

Alla vet att en bil, en dator eller en fabrik bullrar. Men exakt vad det är som bullrar, vilka delar av bilen är mest ljudgenomsläppliga, exakt var knirkar det i instrumentpanelen, det är mycket svårt att ta reda på med bara öronen som hjälp. Kunde man se ljud skulle det underlätta.

Ljudmätningar på industrier och utvecklingsavdelningar har hittills inskränkt sig till att man mer eller mindre empiriskt letat efter bullerkällor med öron och decibelmätare. Att mäta igenom en hel kilometerlång industribyggnad som har bullerproblem kan ta flera månader. Alla är medvetna om att en maskin som håller på att gå sönder skramlar, men exakt var och hur skramlar det? Vilket blad på vindkraftverket bullrar? Var uppstår vindtjut? Tyska gfai tech GmbH har tagit fram en akustisk kamera som faktiskt kan se ljud och ge svar på alla dessa frågor. Elegant och enkelt dessutom.
Med Gfais akustiska kamera kan man ”fotografera” ljudet, genom att lägga ett ”akustiskt foto” ovanpå en vanlig bild, och se exakt var det bullrar, vilka frekvenser bullret består av och peka ut exakt vilka frekvensområden de olika maskindelarna avger. På ett par minuter.
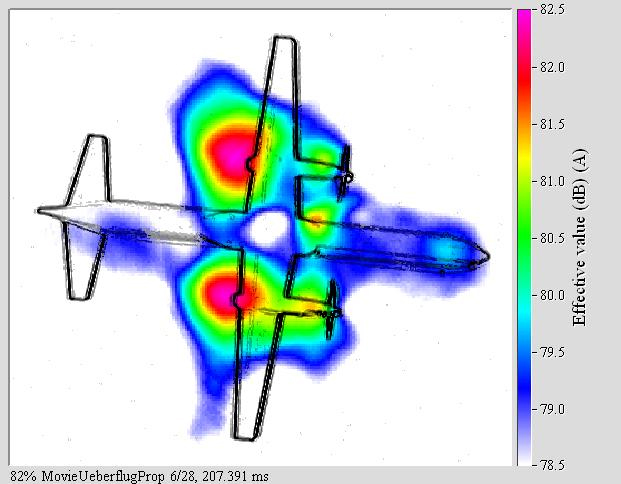
Inte helt oväntat är det motorerna som bullrar på ett flygplan. Turbinernas utblås bullrar mer än propellrarna.
Inget vanligt cykelhjul
Nedslagna runt kaffebordet hos Acoutronic i Solna berättar Torbjörn Kloow om den märkliga ring som står framför oss: en cirkulär mikrofonarray med 48 elektretmikrofoner monterade runt periferin på en 75 centimeters ring i kolfiber.

Små elektretmikrofoner används, anslutna till MicBus-mikrofonanslutning.
– Det kan se ut som ett cykelhjul men är i själva verket en array av mikrofoner arrangerade så att de kan känna riktningen till de ljud som faller in framifrån, och med ca 45 graders infallsvinkel. Signalerna från mikrofonerna går in till ett datainsamlingssystem som A/D-omvandlar ljudet och utför ett antal algoritmer på det. I mitten av ringen sitter en USB-ansluten kamera som förser oss med en visuell, synlig bild av det som ljudkameran ser. Efter bearbetning i datainsamlingssystemet kan ljudtrycket i varje punkt, det akustiska fotot, visas överlagrat på den optiska bilden på den anslutna bärbara datorn, antingen som stillbild eller som film.
Anledningen till att man använder en fristående bearbetningsenhet är att ljudkortet i en PC inte klarar 48 ljudkanaler och att en Windows-PC inte skulle hinna med att fouriertransformera data på rimlig tid. GFaIs senaste array har 120 mikrofoner och det skulle ge PCn ännu mer problem.
Den akustiska kameran fungerar precis som öronen, fast oändligt mycket noggrannare. När ljudvågen faller in mot matrisen korreleras fasskillnaderna, och tidsskillnaderna används för att bygga upp en bild av var ljudet kom ifrån. Ljud kan emellertid falla in från flera håll samtidigt och bestå av ett helt spektrum och det är där de smarta algoritmerna kommer in.
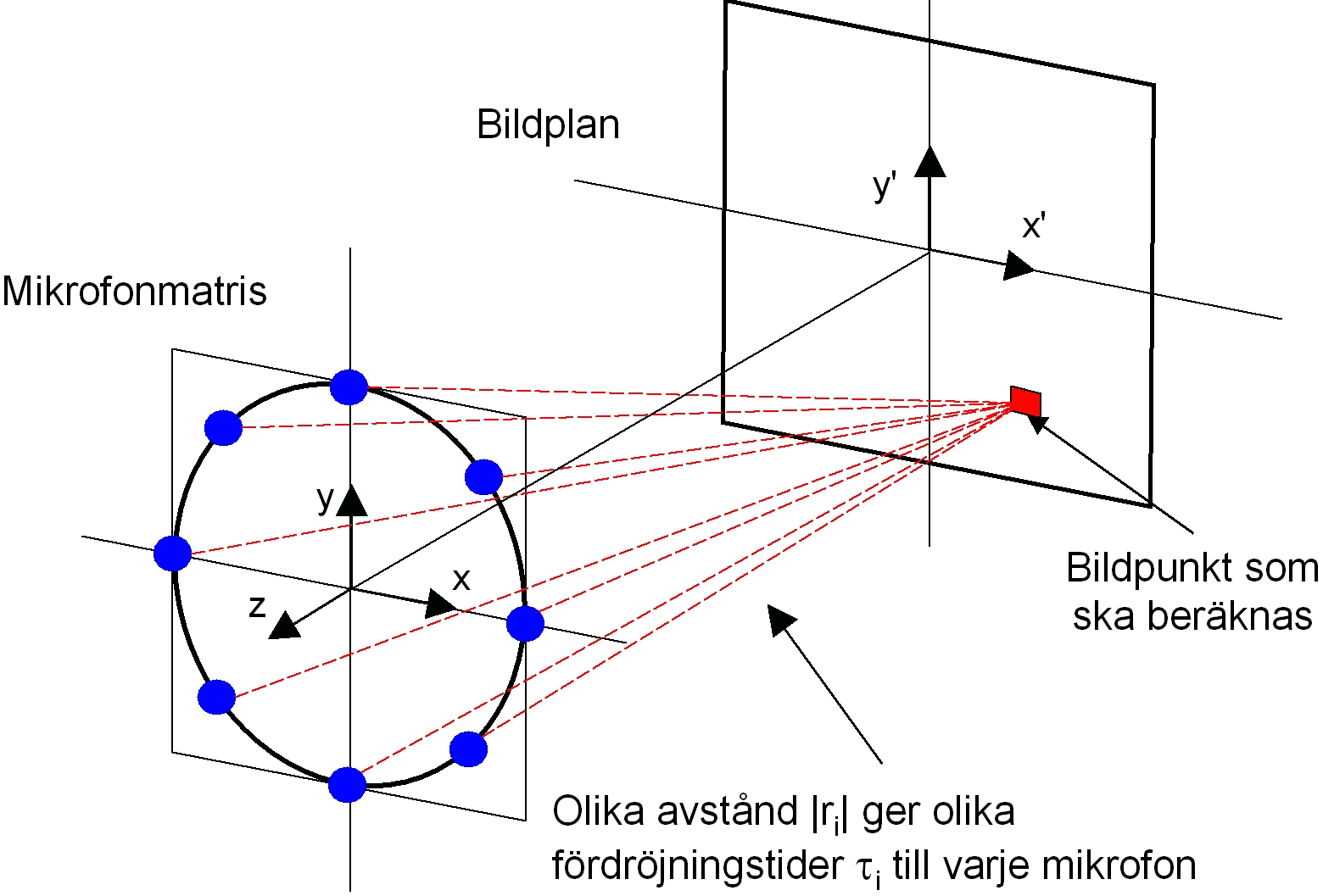
Principen är enkel. Ljudet från en ljudkälla tar olika lång tid på sig att nå fram till mikrofonerna och genom att man vet var mikrofonerna finns kan man beräkna ljudkällans läge. Det blir mera komplicerat om det finns flera ljudkällor, men principen är den samma. Om frekvensen är låg och ljudet utan transienter mäter man istället fasförhållandet mellan de olika mikrofonerna. Det fungerar redan med två mikrofoner, men med 48 ökas noggrannheten och man kan mäta i höjdled också.
Börja mäta
En mätning börjar alltid på samma sätt. Mikrofonarrayen ställs upp på specificerat avstånd från mätobjektet varefter man kör motorn, symaskinen, vindkraftverket eller raffinaderiet ett par sekunder upp till flera minuter och spelar in alla 48 kanalerna. Det digitalomvandlade ljudet lagras och kan därefter behandlas på ett flertal sätt: frekvensanalys, filtreringar, vägningskurvor, orderanalys, tredjedels-oktavanalys.
Den erfarne vet direkt vilket frekvensområde som är intressant och ställer in programmets bandpassfilter till att ta fram detta frekvensband. I annat fall måste man göra research och sätta sig in i mätobjektet i förväg. Med hjälp av fouriertransformering kan man åstadkomma mycket branta filter, på upp till 120 dB/oktav. Därefter framställer programmet ett ”akustiskt foto” av den ljudbild det ”hört” och visar ljudtrycket som olika färger på datorn.
Ljudkameran ser oss församlade runt ett konferensbord och du ser diverse grejor på bordet. Den optiska bilden är i kantvisningsläge. En person visslar och du ser den höga intensiteten (lila) runt munnen.
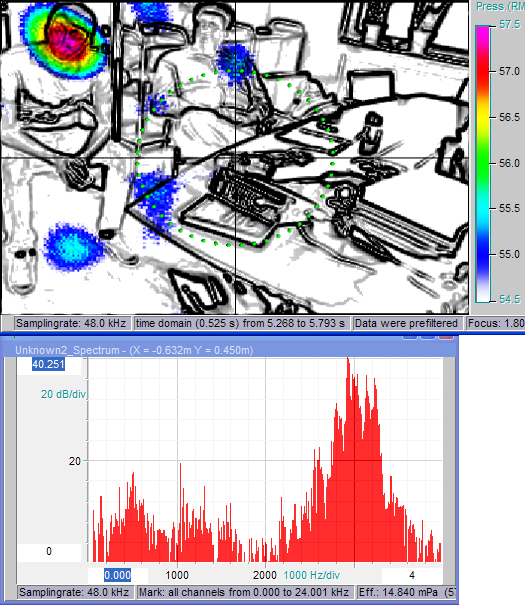
Högerklickar man på en ”akustisk pixel” mitt på visslaren visas det röda spektrumet där de högsta topparna i brustratten ligger runt 3 kHz. Den blågröna ljudpannkakan på golvet är en reflex.
Vet man inte vad som är intressant kan man göra ett spektrogram av inspelningen, alltså ett diagram som visar hela inspelningen med frekvenserna efter Y-axeln och tiden efter X-axeln, och nivån som en temperaturskala. Nu är det tämligen lätt att urskilja de intressanta bitarna, till exempel dominanta frekvensband eller formationer som återkommer, till exempel skarpa kanter eller böjar en gång för varje varv vindkraftverket svänger. Man drar upp en markeringsruta runt just det man är intresserad av, till exempel bara en tjutande maskindel, bara en visslande backspegel, eller sekunderna när jetflygplanet flög förbi, då filtrerar programmet utifrån det markerade tidsavsnittet och filtrerar mellan de markerade frekvenserna och framställer ett akustiskt foto av bara detta.
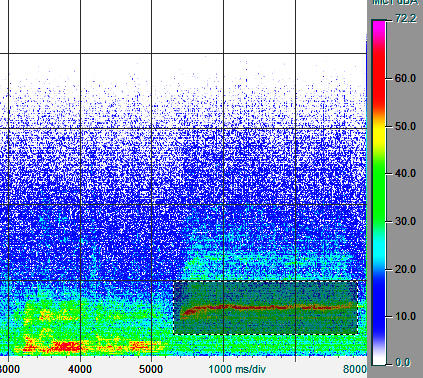
Hur hittade vi visslingens frekvenser bland projektorns muller och allt prat i rummet? Bilden visar spektrogrammet och den lite mörkare rutan visar hur vi skurit ut en fast (röd) linje som utgör visslingen runt 3 kHz och valt att visualisera endast denna.
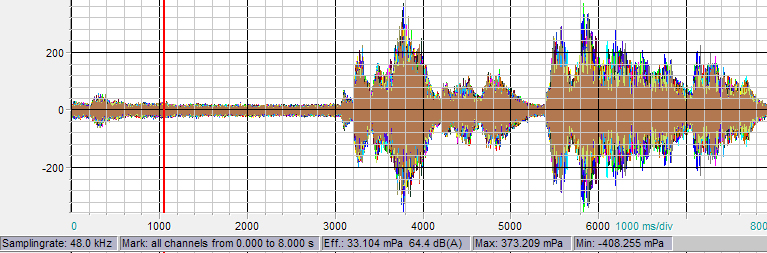
Fallet med visslingen i råformat. Alla de insamlade 48 kanalerna tillsammans ser ut som vilket digitaliserat ljud som helst.
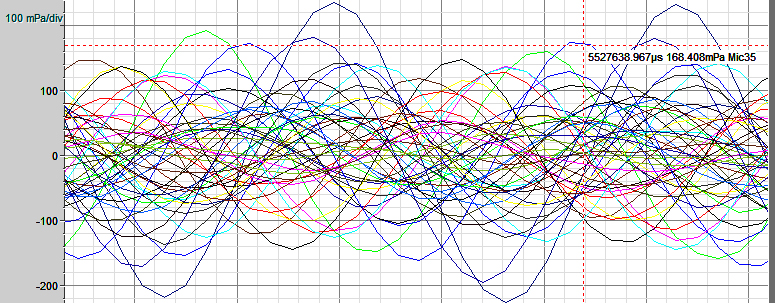
Zoomar man på en sekvens, bara visslingen, ser vi de olika sinusvågornas tidsförskjutningar. Vi har satt markören på mikrofon 35 och ljudtrycket är för närvarande 168 mPa.
Att jobba i spektraldomänen
Men exakt vad ljudet består av, övertonerna och brustrattarna, vet vi ännu inte. Det akustiska fotot är indelat i ”ljudpixlar” (akustiska pixlar) och genom att högerklicka på en akustisk pixel kan man visa hela spektrum för just denna akustiska pixel utan bandbegräsningar, i ett annat fönster. Man kan dessutom lyssna på ljudet från varje akustisk pixel. Nu kan man tydligt se och höra vilka resonanser just denna punkt är utsatt för, om det till exempel är ett hålrum som uppvisar en grundton och övertoner, eller om det bara är brus. Frekvenserna visas i klartext och konstruktören kan direkt ändra på konstruktionen för att arbeta bort resonansen.
Antag istället att vi har några intressanta resonanstoppar. Då kan vi låta programmet visa var på bilden just dessa frekvenser dominerar. Det kan underlätta om man till exempel ska tillverka avstämda absorbenter.
Varvtalsberoende visning
Programmet och A/D-omvandlaren har en ingång för varvtalsmätning. Maskiner man undersöker har en förmåga att låta olika vid olika varvtal. Kanske den eftersökta resonansen bara uppstår vid 1356 varv per minut? Då kan man låta kameran sonografera vid stigande varvtal, varefter man kan titta på bilder som representerar olika varvtal och peka ut ”heta” punkter och det varvtal de motsvarar.
Line scan och filmer
Man varför inskränka sig till stillastående maskiner och industrier. Programmet är kapabelt att filma med digitalkameran medan ljudet samlas in. Efteråt ändrar man bara visningsmetoden lite och visar filmen medan man visar ett antal akustiska foton (= akustisk film) ovanpå bilden. Ljudbilden kommer att röra sig med den optiska bilden och det blir uppenbart exempelvis vilken vinge på vindkraftverket som bullrar mest och om den bullrar mest på väg upp eller på väg ned.
Ett helt snabbtåg får inte plats på en bild och även om det gjorde det så finge man ingen bra upplösning. Då kan man ställa kameran vid banvallen och filma medan tåget far förbi, med samma metod som ett målfoto på en travbana, även kallat Line scan.
![]()
Här har ett tyskt intercitytåg åkt förbi med kameran i line scan-läge. Man registrerar tåget allt eftersom det åker och visar som en enda lång bild. Du ser att det är det dragande loket och den närmsta vagnen som bullrar mest och intressant nog även strömavtagaren på motorvagnen i slutet.
Reflexer
Ljud är som ljus. Det bryts och reflekteras och det får man se upp med när man sonograferar, så man inte misstolkar en reflex i en motorhuv för ett ljud. Mätningar på mindre enheter gör man därför företrädesvis i ett ekofritt rum. Utomhus är blåst, regn och kyla den värsta fienden eftersom den kan åstadkomma buller eller störa mätutrustningen.
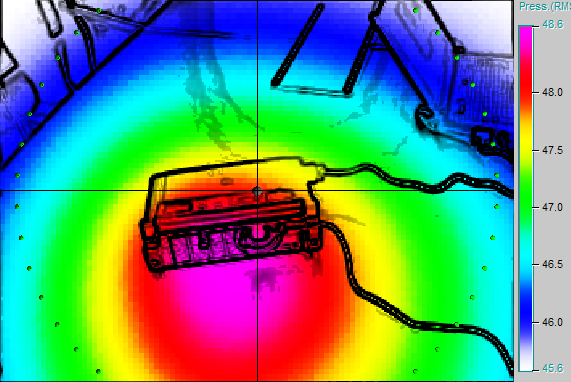
Här har vi mätt med den akustiska kameran på en videoprojektor framifrån. Föga överraskande kom det mesta bruset (lila) ut från kylgallret till vänster. Den lila fläcken på bordet visar att brus även kommer ut undertill och studsar på bordet.
CAD och 3D
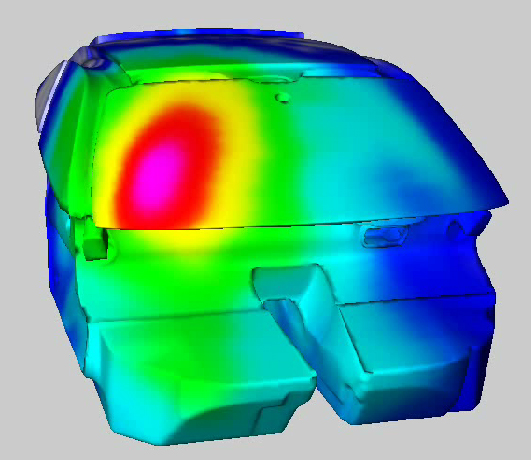
Gfais mest avancerade mikrofonmodell är sfärisk och kan uppfatta ljud från alla håll, eller i tre dimensioner om man så vill. Det tillhörande programmet kan sedan mappa bilden på en CAD-modell av det man mätt på, det kallas ett tredimensionellt akustiskt foto, till exempel insidan av en bil. Då går det att se var bullret kommer in, eller vilka delar av bilen som knirkar eller var vindbruset kommer från.
Just biltillverkare har mycket strikta krav på hur deras produkter ska låta, medan myndigheterna har krav på att de inte ska låta. En bil har sitt karaktäristiska ”sound”, ett särskilt muller och helst ska inga andra ljud störa eller låta ”plastiga”. En bildörr som stängs ska låta bastant och stabil utan andra knirkanden, och fönsterhissar får inte skrapa. Ett fenomen som är svårt att komma åt är vindtjut runt utstickande delar i höga farter. Visst kan man ställa en bil i vindtunnel och försöka lyssna sig fram till vad det är som tjuter, men den akustiska kameran ger svaret direkt.
Den akustiska kameran har öppnat en ny dimension för den hörande människan. Det man tidigare sökte efter med ljus och lykta är idag uppenbart och rullar fram som lättolkade bilder på en bildskärm. Snart kan den akustiska kameran ta oss ännu längre. Forskning pågår för att kunna avgöra ljudets utstrålade effekt och därmed kunna beräkna hur långt bullerstörningarna når, allt för att den hörande människan i möjligaste mån ska slippa höra.
Läs mer
Om den akustiska kameran: https://www.acoustic-camera.com/
Acoutronic finns på http://www.acoutronic.se/#cath=home
Gfai Tech GmbH tillverkar kameran: https://www.gfaitech.com/en.html
Läs särskilt broschyren: https://www.acoustic-camera.com/fileadmin/acoustic-camera/support/downloads/AC_brochure_2017_EN.pdf
Produkterna
Acoutronic distribuerar mätinstrument från hela världen, huvudsakligen till Norden och Baltikum. Här är några av de akustiska kamerorna från Gfai Tech GmbH. Arrayens storlek avgör den undre gränsfrekvensen, för om avståndet mellan de yttersta mikrofonerna blir mycket mindre än en våglängd blir mätningarna meningslösa. Alla enheter har en USB-kamera mitt fram för den optiska bilden.
Ring 48-75 DIF, en 75-centimeters kolfiberring med 48 mikrofoner, för inom- eller utomhusbruk på relativt korta avstånd.

Antal mikrofoner: 48
Mätavstånd: 0,5 – 10 m
Mätfrekvens: 300 Hz – 20 kHz
Dynamiskt område: 35 – 130 dB
Diameter: 75 cm
Sphere 48, en 35-centimneters boll med 48 mikrofoner, för 3D-bruk i små utrymmen, t ex bilar för att söka knak, klickljud och vindbrus.

Antal mikrofoner: 48
Mätavstånd: 0,3 – 1,5 m
Mätfrekvens: 1 kHz – 10 kHz
Dynamiskt område: 35 – 130 dB
Diameter: 35 cm
Star 48, 3-meters hopfällbar stjärnstruktur med 48 mikrofoner, för utomhusbruk på längre avstånd, för industrier, fordonsljud mm

Antal mikrofoner: 48
Mätavstånd: 3 – 300 m
Mätfrekvens: 100 Hz – 7 kHz
Dynamiskt område: 35 – 130 dB
Diameter: 3,4 m
mcdRec, datainsamlingsenhet och A/D-omvandlare för mikrofonerna och andra sensorer.

Upp till 168 mikrofonkanaler (sampling 48 – 192 ks/s)
Inspelningsbuffert vid 192 ks/s: 43 sek
Upplösning: 24 bitar
12 digitala inkanaler (sampling upp till 6,1 Ms/s)
1 Gbps Ethernet mot PC
Dessutom behövs programvaran NoiseImage för visning och efterbehandling i PC.







Pingback: Bärbara datorns anatomi – Teknikaliteter