

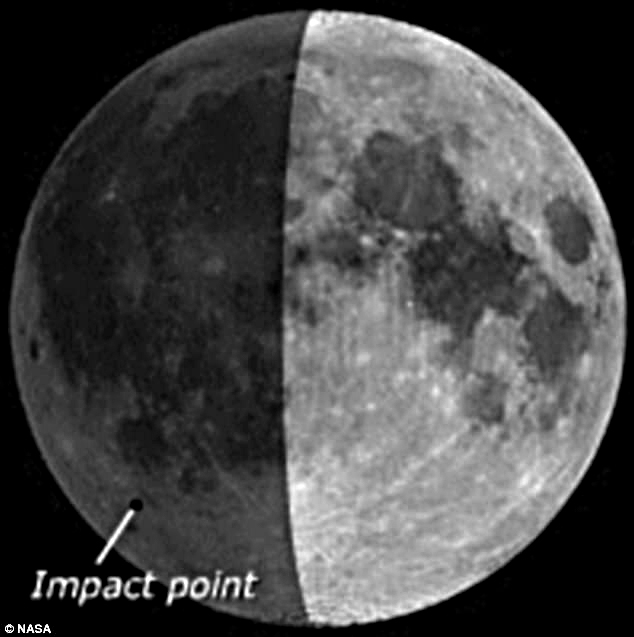
Och nu vet vi var!! Ett stycke teknikhistoria som plötsligt blivit aktuellt med en smäll. När den svenskbyggda rymdfarkosten SMART-1 rände rätt in i månytan med 2 kilometer i sekunden år 2006 blev det ett rejält hål och en kaskad av måndamm slogs upp. Då såg vi bara blixten och kaskaden. Numera har man hittat nedslagsplatsen exakt. Kanske är Månen trots allt en ost med en massa hål? Fast det är vi som har gjort hålen.

Så här tänker sig en konstnär att SMART-1 kan ha sett ut på sin väg mot Månen. Den fyrkantiga föremålet i mitten, med en vit ring, är den jonmotor som utprovades under färden. Bild: ESA
Svenska forskare har väldigt god erfarenhet av att bygga mindre satelliter för banor nära Jorden. Institutet för Rymdfysik har också utomordentligt god erfarenhet av att bygga elmätinstrument för rymdfysiska fenomen, som snart färdats runt hela solsystemet. Men första och enda gången hittills som svenskar byggt en månsond, var 2005, då SMART-1 (Small Missions for Advanced Research in Technology-1) sändes iväg från franska Korou på toppen av en Ariane-5-raket, med destination månens sydpol. Det var ingen liten uppgift att samla ihop alla delar som behövdes (stjärnsensorer, reaktionshjul och gyron) och designa chassit. Drivmotorn var dessutom en helt ny, elektriskt driven jonmotor. Skulle det fungera?
Peter Rathsman på OHB i Kista, före detta Rymdbolaget, som var projektledare och själv byggde ihop farkosten, fick svara på den frågan.
– Jag började på Rymdbolaget 1983. Då var Tele-X- och Viking-satelliterna nya och mitt första jobb var att beräkna chassit till Tele-X för att förutsäga hur det skulle bete sig i rymden och under uppskjutningen. Viking användes till plasmafysikmätningar, något som Sverige är väldigt duktigt på. Rymdbolaget erbjöd sig att bygga Viking-2 till ett lägre pris än Saab Space, vann upphandlingen och kallade satelliten för Freja. Intresset för billiga mikrosatelliter väcktes och vi funderade på om man kunde bygga en bra vetenskaplig satellit för under tio miljoner. Det lyckades vi med, nämligen Astrid och Astrid-2, som fick stort pådrag i media, mest för att vi fick Astrid Lindgrens välsignelse och att instrumenten ombord hette Pippi och Emil och så vidare, säger Peter.
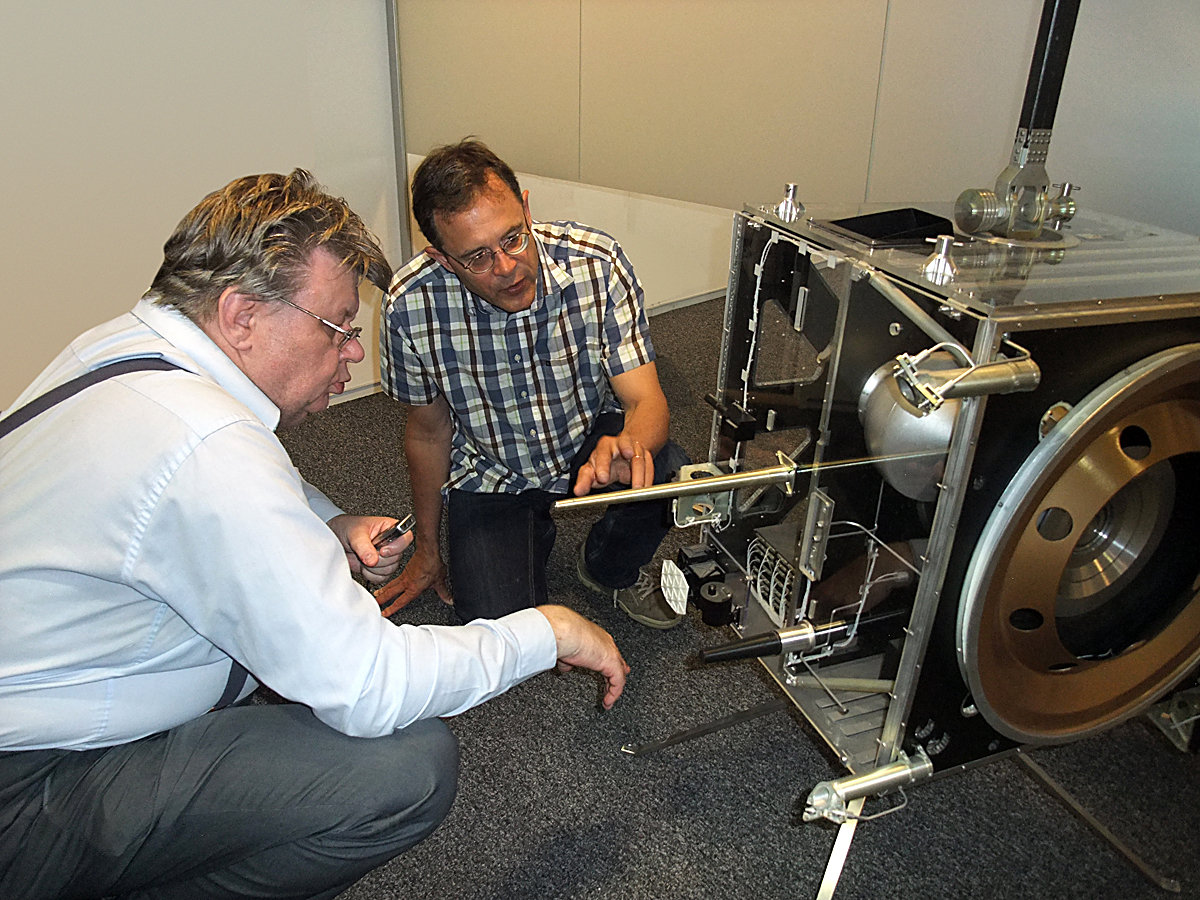
Peter Rathsman och undertecknad studerar en halvskalemodell av farkosten SMART-1 (minus solpanelerna). Peter pekar på den langmuirprob (SPEDE) som mäter elektriska laddningar i rymden och eventuell kontaminering från jonmotorn. Den svarta konen vid min hand är en rundstrålande antenn för telemetri på S-bandet. Jonmotorn (brun ring) vetter åt höger och den blanka bollen i mitten är trycktanken för hydrazin till attitydmotorerna (de små, blanka pinnarna som sticker ut). Bild: Audrone Vodzinskaite.
– Det gav oss ett rykte om att kunna bygga bra och billiga småsatelliter. Det var bara vi och University of Surrey som kunde det i Europa. NASA hade nyligen startat sin satsning kallad ”Faster, Better, Cheaper” och ESA (Europeiska Rymdstyrelsen) ville inte vara sämre utan startade SMART-programmet (Small Missions for Advanced Research in Technology) för billig utprovning av kritisk teknik, i avsikt att minska riskerna för dyrare rymdfärder som skulle utnyttja tekniken senare.
Rymdbolaget fick agera projektledare, fick utveckla programvaran ombord och bygga styrdatorn, valde ut, köpte in och provade all OEM-utrustning och specificerade chassit (som byggdes av ett schweiziskt företag). Alltihop skruvades ihop hos RUAG i Linköping. Därefter levererades farkosten till ESA, som gjorde alla banberäkningar, stod för djuprymdskommunikation, planerade tidsschema för kommunikationen och tillhandahöll nedladdad telemetri på en server. På samma sätt kunde OHB tanka upp ny programvara till farkosten, när det behövdes. Telemetrienheten ombord verifierade datat och lagrade det i massminnet, man läste tillbaka det till Jorden för att se att det var rätt och sedan bootades centraldatorn om med det nya datat.
Det första man ville prova var en ny typ av framdrivning, en eldriven jonmotor i en färd till Månen. Man ville lära sig flyga med elektrisk framdrivning. Det som är svårt med jonmotorer, på grund av den låga dragkraften, är att man alltid måste vara på rätt plats vid rätt tid. Det går inte att göra en kraftig inbromsningsmanöver för att fångas av Månens gravitation, som på apollotiden, utan man måste ”falla in i månens armar”. Därför användes en sk resonant bana, med ett omlopp som var en jämn multipel av Månens omloppstid, vilket betyder att om man hade missat Månen skulle farkosten ändå ligga i ett läge dit Månen återvände efter ett par veckor.
SMART-1 behövde också byta banplan. Den skickades upp i en ekvatoriell bana, tillsammans med ett par telekomsatelliter som skulle till geostationär bana, men måste fångas av Månen i en polär bana. Vridningsmanövern var komplicerad och tog 800 banvarv och 13 månader för att till slut nå Månen, avslutar Peter.
Kopplingsschemat
Farkostens kopplingsschema är tämligen rakt på sak. Man kan börja med att notera att SMART-1 var en av de första rymdfarkosterna någonsin där dataöverföringen utfördes över CAN-bussar. Precis som i en bil har man flera bussar för att få redundans. En (blå) som hanterar nyttolasten, som inte är viktig för farkostens överlevnad och en annan (röd) som hanterar alla de driftkritiska systemen. CAN-bussen har inte blivit så populär i rymden som OHB hade hoppats, eftersom den är stokastisk och inte en master/slave-realtidsbuss, varför de flesta fortfarande använder flygbussen ARINC 1553, särskilt i radartillämpningar.
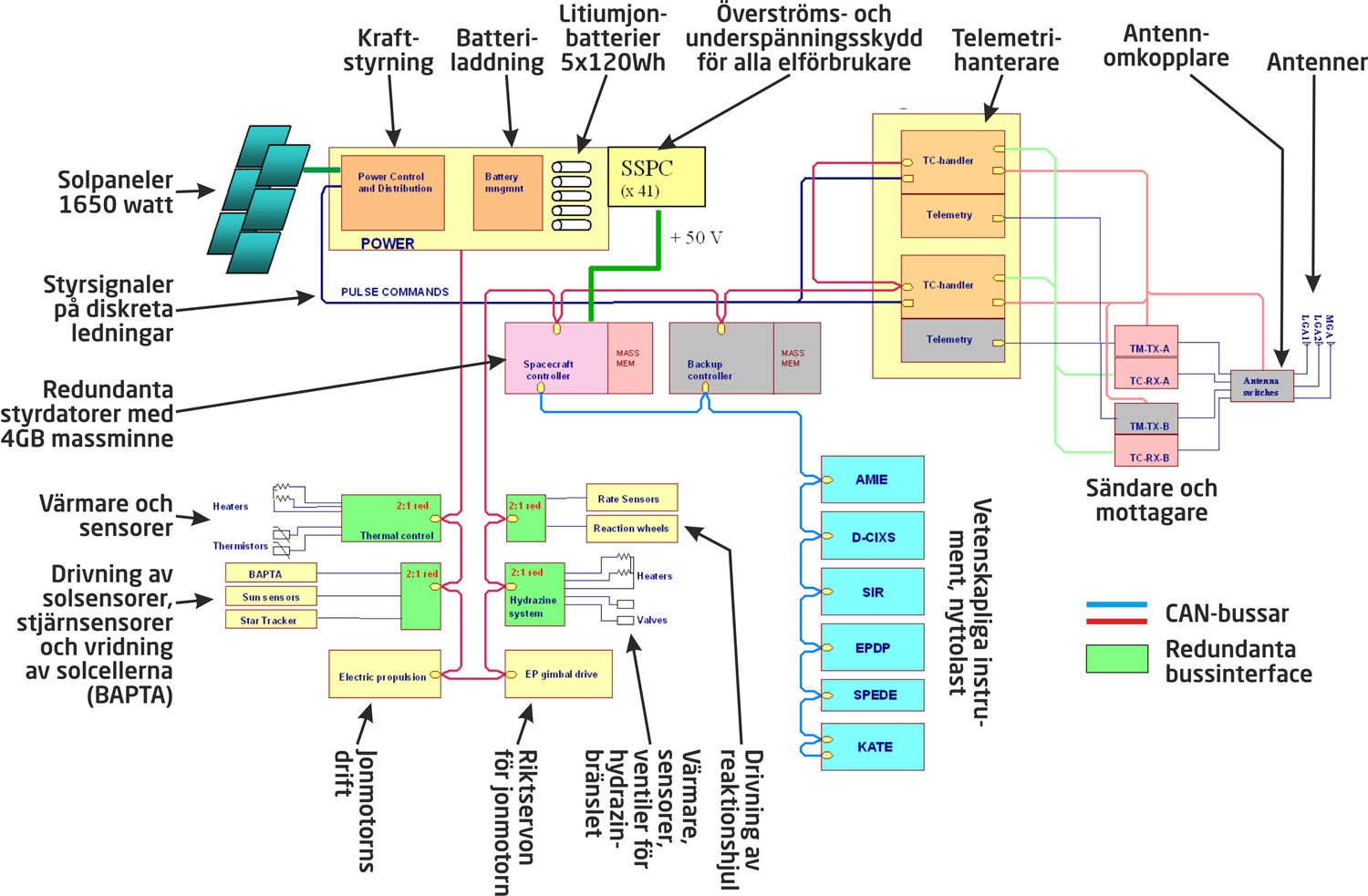
Centralt för funktionen är de båda redundanta styrdatorerna, som helt och hållet kan ersätta varandra. ERC32-processorn (SPARC-typ) med sina 20 MHz klockfrekvens är inte världens hetaste, men den klarar en miljö som inga jordiska datorer klarar. Den slutar inte fungera bara för att solen gör en massutkastning och vräker ett antal hundra rad strålning genom datorn. En kontorsdator skulle haverera omedelbart. Datalagringen uppgick till hela 4 GB!
Sändning av data till Jorden kallas traditionellt för ”telemetri” och allt data som ska sändas ned, överlämnas till telemetrienheten. Den paketerar datat som kommer på CAN-bussen i frames, som sedan förses med CRC-kod, faltningskod och Reed-Solomon kod, och skickar det vidare till de redundanta sändarna TMTXA/B.
Data från Jorden kallas för ”telecommand” och tas emot av de redundanta mottagarna TCRXA/B. Det kan utgöra styrkommandon eller programuppdateringar. Data tas emot och verifieras av TC-handler innan det överlämnas till centraldatorn. På ledarknippet Pulse Command kan TC-handler dessutom mata ut nödkommandon i form av diskreta elektriska pulser. Varje pulskommando från Jorden genererar sålunda en puls på TM-TC-kortet som kan användas till att till exempel byta antenner, starta om centraldatorn, starta om kraftstyrningsenheten etc. Detta sker utan centraldatorns medverkan, eftersom den exempelvis kan ha kraschat och måste startas om.
Utspänningen från triple-junction-solpanelerna är ungefär sisådär 52 volt, vilket switchas ned till 4 volt för litiumjonbatterierna och sedan upp till stabil 50-volt (+/– 0,5 V) som driver alla enheter i farkosten. Skyddsenheterna SSPC (Solid State Power Controller) består av ett antal elektroniska switchar som är kopplade i serie med varje apparat och skyddar satelliten mot felaktigheter i apparaten (automatsäkring). SSPC utlöses också vid förbestämd underspänning för att undvika att till exempel en centraldator skulle förses med så låg spänning att den hänger sig.
Utrustningen för satellitens drift har för det mesta redundanta anslutningar till CAN-bussen. Det rör sig om olika servomotordrivare, bränsleventiler, värmare för att hålla hydrazin och xenon flytande i rymdens kyla och sensorer som känner av innertemperaturen i olika delar av farkosten. Dessutom finns drivsystem för reaktionshjulen som håller farkosten på rätt köl i XYZ-led genom att motverka vridningskraften från motorerna. Det finns även ett antal sensorer, som dels söker efter Solen (sun sensor) för att behålla satellitens orientering, och en stjärnsensor (star tracker), i princip en digitalkamera som känner igen olika stjärnkonfigurationer och hjälper till vid navigeringen.
Jonmotorns drift och inriktning hanteras tämligen summariskt i bilden, men det rör sig om två servomotorer som kan vrida motorn och en hel del annat, bland annat högspänningsgeneratorer och gasventiler för själva framdriften.
Vetenskapliga instrument ombord
Det fanns utrymme, eleffekt och kylning över så att det räckte till sju vetenskapliga instrument som vägde totalt 19 kilo, men de var inte det viktiga på färden.
EPDP (Electric Propulsion Diagnostic Package) var ett övervakningssystem som undersökte jonmotorn och dess effekter på farkosten, bland annat om föroreningar som sputtrats bort från jonmotorn skulle ansamlas. Det gjorde de inte.
SPEDE (Spacecraft Potential, Electron and Dust Experiment) bestod av två langmuirprobar som mätte farkostens potential i förhållande till omgivande rymd och hur denna påverkades under framdrift. Månen tänks dra upp ett kölvatten i solvinden och därmed i Jordens magnetosfär och detta ville man verifiera.
KaTE (X/Ka-band Telemetry and Tele-command Experiment) var ett bandbreddsexperiment i kommunikation mot Jorden, både mot NASA Deep Space Network och ESAs motsvarande kommunikationsnätverk. Det gav 500 kbps över en bärvåg på 32 GHz.
D-CIXS/XSM (Demonstration of a Compact Imaging X-ray Spectrometer) undersökte röntgenfluorescens från Månen, med Solen som strålkälla. Den hittade kalcium på Månen. XSM studerade röntgenstrålningen från Solen, för att man skulle kunna kalibrera CIXS.
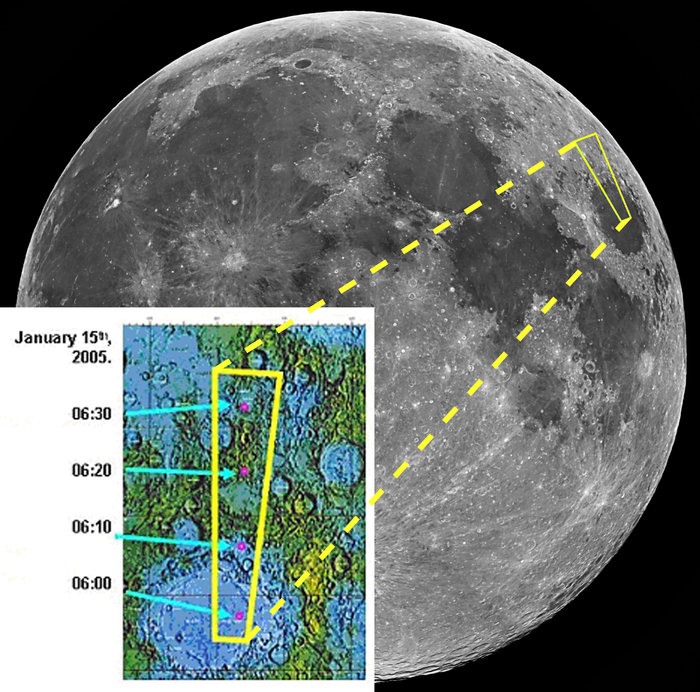
Under ett solutbrott den 15 januari 2005 träffades Månen av tillräckligt mycket röntgenstrålning för att ytan skulle glöda i reflekterad röntgenstrålning i våglängder som är karaktäristiska för ämnena kalcium, aluminium, kisel och järn, vilka D-CIXS kunde tolka. Finns det kalcium på Månen så finns den viktigaste beståndsdelen till cement, som behövs för en bosättning. Att det finns vatten att blanda cementen med, vet vi redan. Mätningen gjordes på fyra punkter, under en halv timme. Förekomsten av kalicum konstaterades redan av apolloastronauterna, men SMART-1 undersökte hela Månens yta, inklusive apolloastronauternas landningsplatser, varför man kunde använda känd information från de markprover som hämtades tillbaka från Månen till att verifiera satellitinstrumentens funktion.
AMIE (Asteroid-Moon Imaging Experiment) var en mycket liten teleskopkamera med fyra filter (0,75, 0,9, 0,95 och 0,847 μm) som tog högupplösta bilder av månytan och av Jorden när tillfälle gavs. AMIE var också med i experimentet Laser-Link i vilket man skickade en laserstråle mot Månen från ESA Optical Ground Station på Teneriffa i avsikt att prova djuprymdskommunikation med laser. Det lyckades.
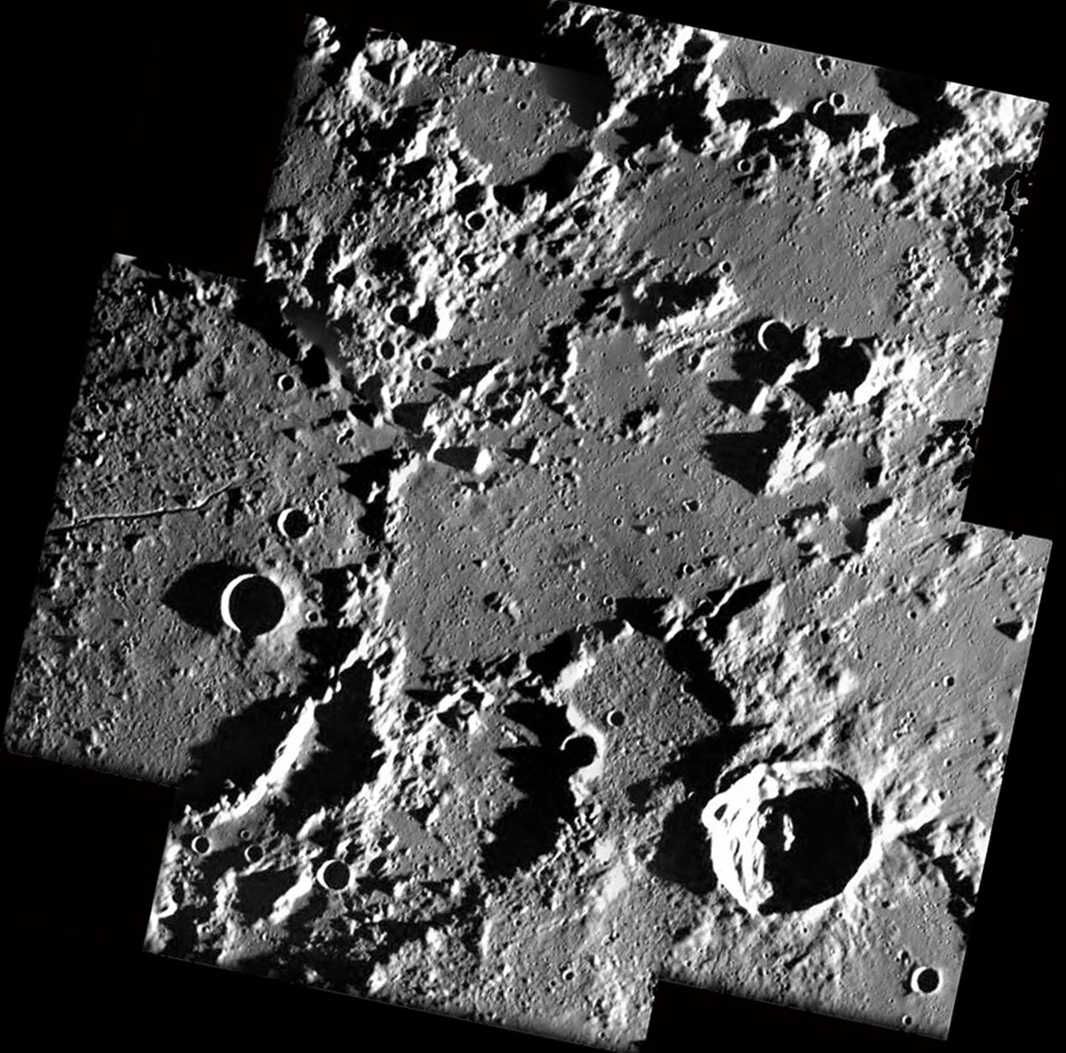
En bit av Månens yta så som den fotograderades av SMART-1 AMIE-kamera. Bild: ESA.
SIR (SMART-1 Infrared Spectrometer) var en infraröd spektrometer med 256 kanaler mellan 0,9-2,4 μm, som användes för mineralogi. Den användes också för att hitta Månens kallaste plats. Det lyckades nästan, för SIR var av nödvändighet varmare än solsystemets kallaste plats.
Satellitbygget
Hur bygger man en satellit? Ungefär som när man bygger en bil eller ett flygplan. Man börjar med ett lätt, starkt chassi och bygger sedan in motorer och annan utrustning.

Alltihop börjar med ett tomt chassi. Så här såg det ut strax innan komponenterna monterades. Chassit har måtten 157×115×104 cm, alltså en rymd av ungefär 1,5 m³ och väger 45 kilo. Du ser att det är helt och hållet i aluminium. Den stora tratten mitt i är där man monterar jonmotorn, dess servon och xenontanken. Den utgör samtidigt en central förstyvning Bild: SSC.

Satellitens chassi byggs upp av mycket starkt och lätt bikakematerial i aluminium där ytmaterialet endast är 0,3 mm. Det väger just ingenting. Här ser du hur en gängad bussning (sk insert) har limmats (det svarta, bubbliga) in i bikakematerialet. Bussningen tål förvånande höga 600 kg dragkraft axiellt, men det är sämre radiellt. Man kan antingen använda aluminium eller kolfiber till satellitens chassi.

Svenskutvecklad styrdator av ungefär den typ som satt i SMART-1. Den är mycket vibrations- och stråltålig och väger 14 kilo.

Satelliter kläs med ett yttre skinn (MLI, Multilayer Insulation) för att dels få skydd mot solens värme (gul aluminiserad kapton) och dels skyddas mot rymdens elektriska laddningar (isolerande dacronväv). Senare tillkommer en svart, ledande ytbeläggning, som fungerar som jordning mot rymden.
![]()
Här är de viktigaste systemen utmärkta med olika färger. Elkraft och kylning är färgade magenta, jonmotorn och dess hantering är cyan, de vetenskapliga instrumenten är gröna, hydrazinsystemet gult, kommunikationsantenner blå, navigationsinstrument röda och styrdatorn är mörkgrön.
Jonmotorns princip

Letar man i ESAs postorderkatalog kan man hitta en jonmotor som ser ut ungefär så här. Utloppet vänder uppåt och de båda ”kanonerna” på sidan är de katoder som sänder ut elektroner för att neutralisera xenongasen i fjärrfältet (cathode neutralizer i principskissen).

Tvärsnitt. Utloppet (lila) är ringformigt och ligger runt den inre magnetspolen. Bild: Wikipedia.
Alla reaktionsmotorer fungerar genom att kasta ut något åt ena hållet och själv fara iväg åt det andra. Man kan antingen kasta ut något tungt, som traditionella kemiska raketmotorer gör, eller kasta ut något väldigt fort som jonmotorn, som kastar ut xenongas. Man har valt xenon för att det är den tyngsta gasen som finns, så den ger bäst dragkraft. Halleffektmotorn fungerar genom att blåsa in xenongasen genom en anod, jonisera den (göra gasatomerna till positiva joner genom att slita bort deras elektroner) och accelerera dem mot den negativa katoden med en spänning på –350 volt. Dragkraften uppstår genom att den elektriska energin i acceleratorn omvandlas till rörelseenergi i de utkastade jonerna.
Elektronerna från katoden utanför får inte slinka in i acceleratorn och neutralisera xenonplasmat och de hindras från detta av ett radiellt magnetfält (Hall-effekten) som skapas av två spolar (yttre och inte spolarna) kring utblåset. Magnetfältet påverkar inte de tunga xenonjonerna, men spärrar de lätta elektronerna. För att inte gasstrålen ska förbli positiv och förskjuta farkostens potential mot den omgivande rymden (skadligt) suger den med sig en ström av elektroner från katoden som på långt håll (fjärrfältet) neutraliserar de positiva jonerna och gör strålen neutral. Katodstrålen fungerar dessutom som en jordning mot det omgivande plasmat. Den utblåsta gasen kan få en fart på uppåt 15–30 km/s vid 350 volt.
Attitydmotorerna som stabiliserade och riktade SMART-1 var av traditionell typ som förbränner hydrazin och kastar ut förbränningsgaserna. För ovanlighetens skull var attitydmotorerna kraftigare (dragkraft 1 N) än farkostens huvudmotor (89 mN vid 1,3 kW ineffekt) men jonmotorn kan gå mycket, mycket längre än attitydmotorerna på sin xenonreserv och blir i slutänden effektivare, nästan tio gånger effektivare än kemiska motorer. Rörelseenergin dvs solenergin, är dessutom gratis.

Jonmotorn monterad på farkostens chassi. Motorn befinner sig den svarta tratten (kylfläns) och pekar uppåt. De mörka, runda klumparna närmast chassit är servomotorer som kan rikta jonmotorn i två axlar. De utfällda stöden används bara för att klara krafterna vid uppskjutningen så att den flexibelt upphängda motorn inte ska kastas hit och dit av accelerationskrafterna, och fälls undan vid drift. De slingriga gröna slangarna leder upp xenon till motorn och ska tåla att servona vrider motorn. Bild: SSC.
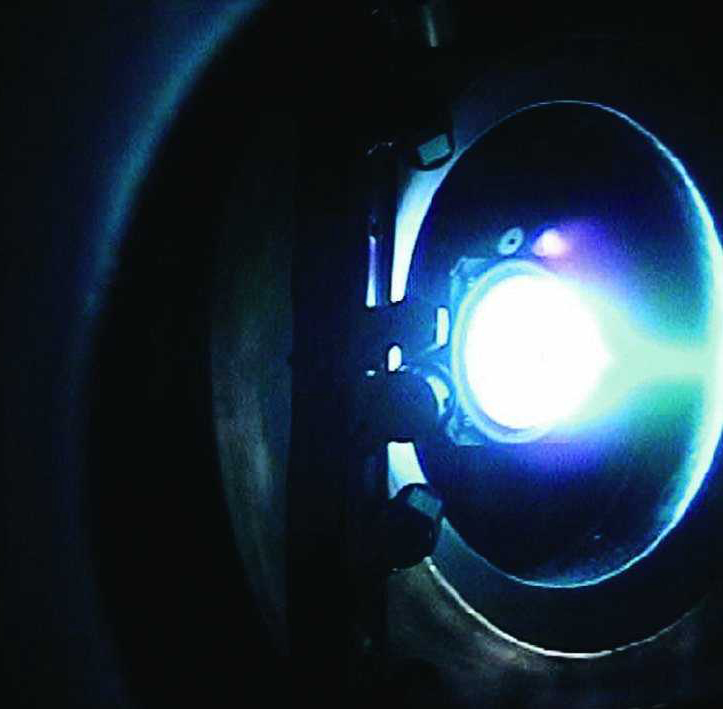
Här bränner man av 1,5 kW genom jonmotorn i vakuumkammare. Det vita är inte en flamma utan en stråle av joniserade xenonatomer. Klumparna närmast i bild är katoderna som sänder ut en ström av elektroner för att neutralisera xenongasen i fjärrfältet. Bild: ESA.

Tanken för xenongas är 42 liter, rymmer 82,5 kilo vid 150 bars tryck och är utförd av kolfiber. Här ska den till att monteras i chassit. Trycket minskas till 2 bar innan det leds till motorn, som dock bara förbrukar cirka 5,4 milligram per sekund. Bild: ESA.
Färdigmonterat
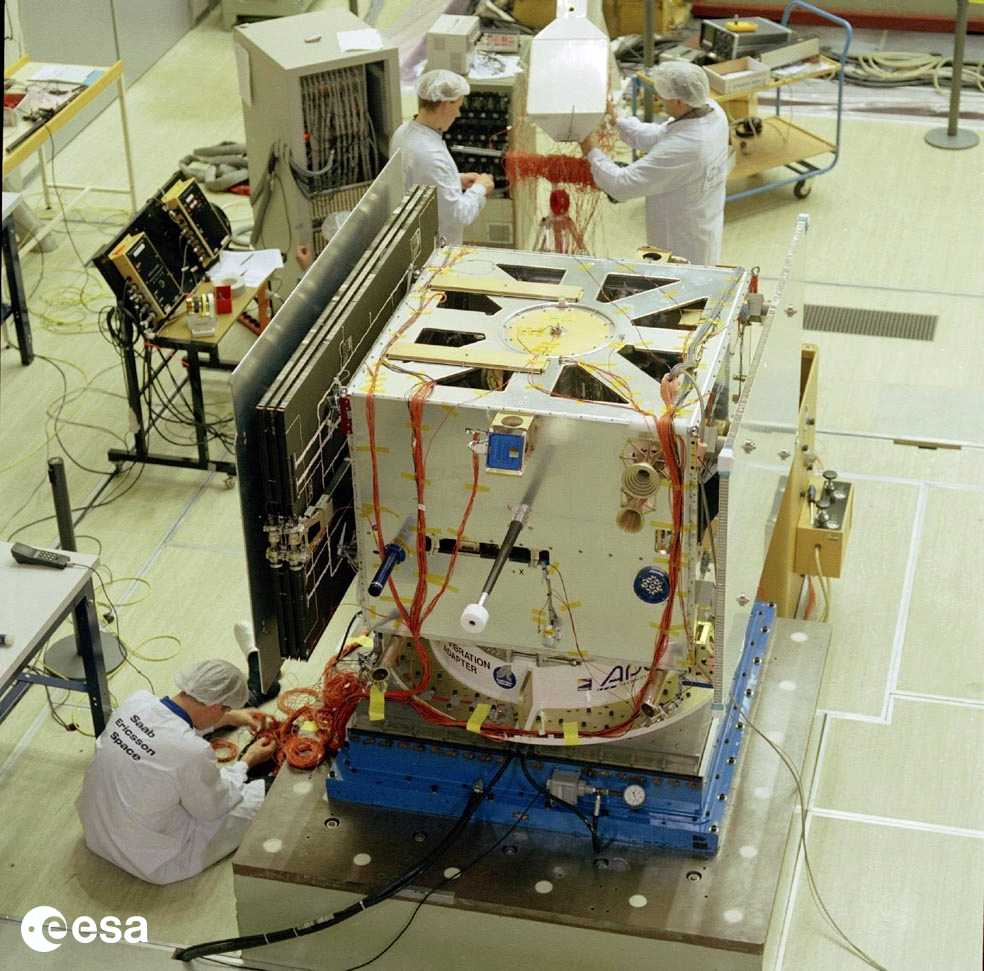
Här är farkosten nästan färdigmonterad och ska vibrationstestas hos ESA. Den står på ett skakbord. En av solcellsvingarna är monterad och hopfälld. Bild: ESA.

Här sitter SMART-1 monterad på toppen av Arianeraketen, innan raketens yttre strömlinjeformade skydd (fairing) satts på. Du ser att satelliten är svart, då den är klädd med en kaptonfilm (MLI) med svart ledande ytbeläggning av sk ”Electrodag” så att den ska kunna jordas korrekt mot det omgivande rymdplasmat. Snart smäller det. Bild: ESA.
På väg mot Månen

SMART-1 sköts upp med en Ariane 5 från franska Korou-basen. Bild: ESA.
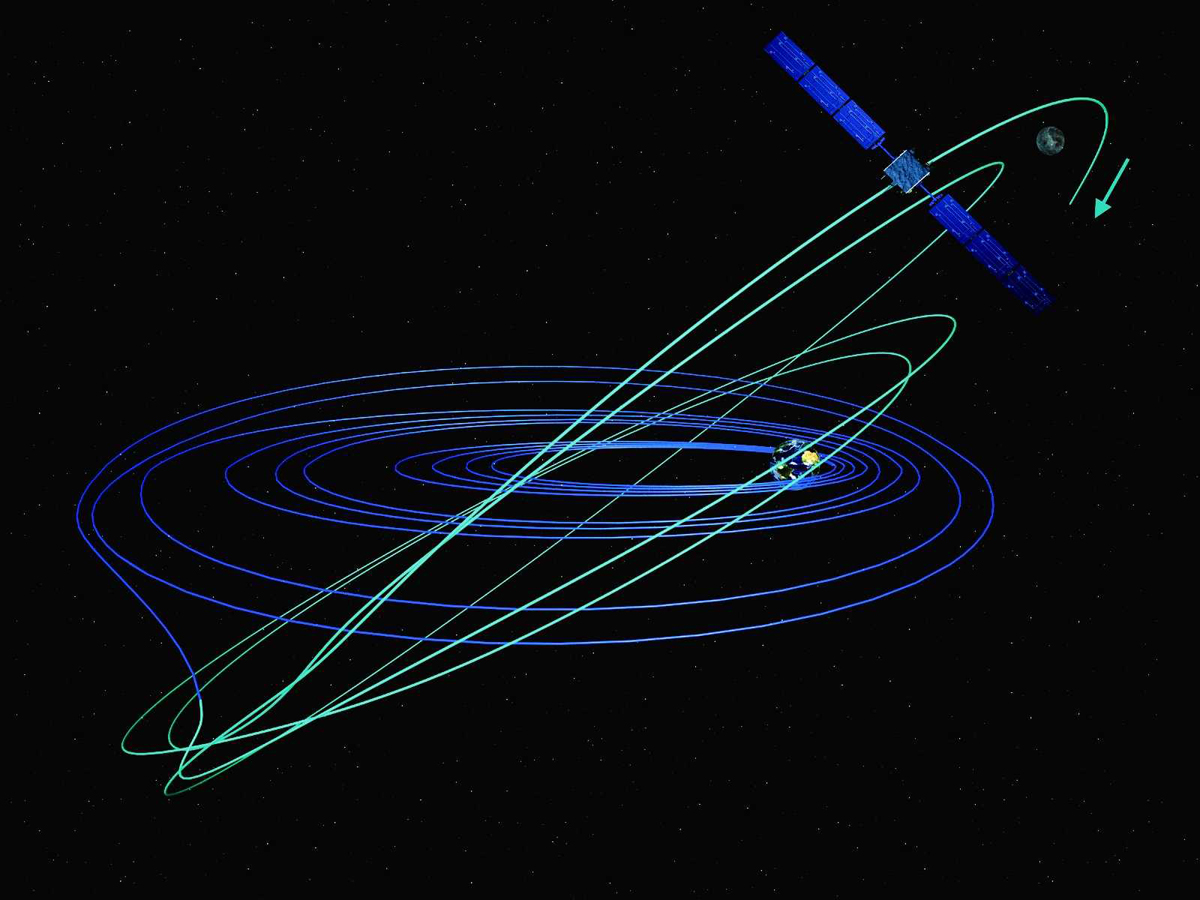
Eftersom jonmotorn har så liten dragkraft tvingas man att gå väldigt många varv runt Jorden och långsamt höja banan (sk spiral trajectory), vrida banplanet för att komma i polär bana kring Månen och ta ytterligare några varv runt Jorden för att ta del av dess rörelseenergi och slutligen fångas in av Månens gravitation. Väl i Månens våld gäller det att bromsa så att banan kring Månen blir lagom hög. Det sista man gör är att sänka banan så långt ned mot Månen att något slutligen tar emot. Det tog 13 månader att slingra sig fram till Månen på det sättet. Bild: ESA.
Framme!

Kratern Shackleton på Månens sydpol, vars botten misstänks ligga i ständigt mörker. Där är det kallt, kallast i hela solsystemet, ja till och med kallare än på Pluto som faktiskt är solbelyst. Allt vatten som driver runt på Månen i form av is-damm hamnar till sist i sådana köldfällor. Man räknar med att istäcket kan vara kilometertjockt. Men kraterkanten är ständigt solbelyst och håller riktigt trevliga temperaturer, idealiska för bosättning och stora solpaneler. Kratern är mellan 3,6 – 4,3 miljarder år gammal, dess position är 89,54° syd och 0° öst och den är 19 kilometer i diameter. Bild: ESA.

Här är en mosaik av bilder som SMART-1 gjorde av Månens sydpol. Mitt i bilden ser du Shackleton-kratern.
Slutet!
En inget vidare noggrann avbildning ib brist på bättre.
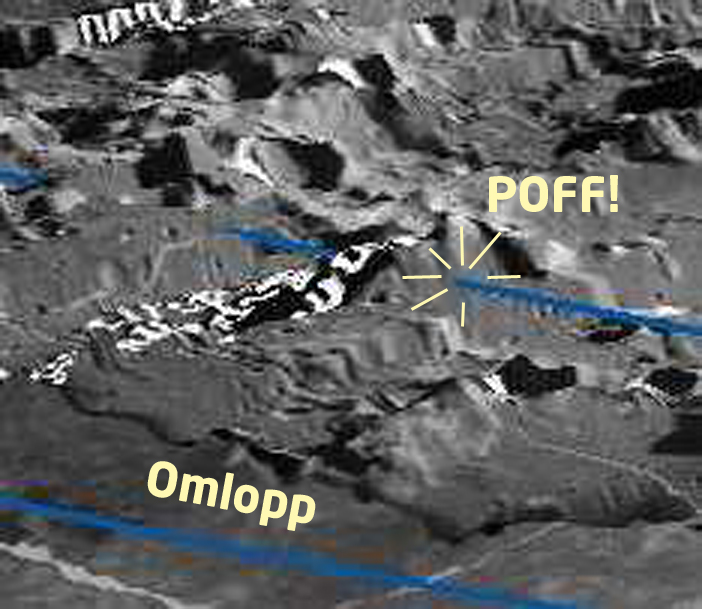
Hur kraschar man en sond på Månen? Man får börja med att skaffa sig en god topografisk karta över månytan, på det ställe där man vill krascha. Någon sådan fanns inte så man fick börja med att bygga en approximativ topografisk modell utgående från de få, glesa lasermätta höjder som NASAs Lunar Prospector lämnat och sedan gissa resten. Som du ser av bilden blev modellen tämligen grov, men gissningarna skulle ändå visa sig vara ganska bra. Nedslaget förutsades faktiskt på sekunden.
Farkosten gick i en hög elliptisk polär bana runt Månen med en lägsta punkt nära sydpolen (eftersom det var den som ska studeras). Genom att helt subtilt flytta banan högre över nordpolen kom banan över sydpolen att sjunka i samma mån. Näst sista omloppet var bara någon kilometer över ytan och under det allra sista varvet kom något månberg att sticka upp för långt och vara i vägen och sonden rände in i det sidledes med 2000 m/s. Så skedde den 3 september 2006. Enligt de kunskaper man hade då, skulle sonden ha slagit upp ett jättehål i väggen till kratern Kaguya. Av de stolta 82,5 kilona xenon återstod då bara 280 gram. Dammolnet som slogs upp, mätte hela 20×80 kilometer och kunde utan vidare ses med jordiska teleskop.
Tyvärr gick det inte att krascha rakt ned i den ständig mörka sydpolskratern man kanske hade önskat sig, eftersom det hade krävt att sonden hade störtat rakt ned. Istället kom den sidledes.
Kraschplatsen funnen år 2017!
Den exakta nedslagsplatsen förblev länge okänd, eftersom det inte fanns någon satellit i närheten som kunde peka ut den exakt. Det räckte inte med att man faktiskt kunde se ljusblixten som uppstod vid nedslaget med teleskop. Men vid en astronomisk konferens kallad European Planetary Science Congress (EPSC) 2017 i Riga den 22 oktober i år meddelade dock Dr. Phil Stooke från Western University i Ontario i Kanada att han hittat platsen efter många års studier av bilder från NASAs Lunar Reconnaissance Orbiter (LRO).
Nedslagsplatsen är 34,262° sydlig och 46,193° västlig längd, ungefär så som platsen beräknades ursprungligen.
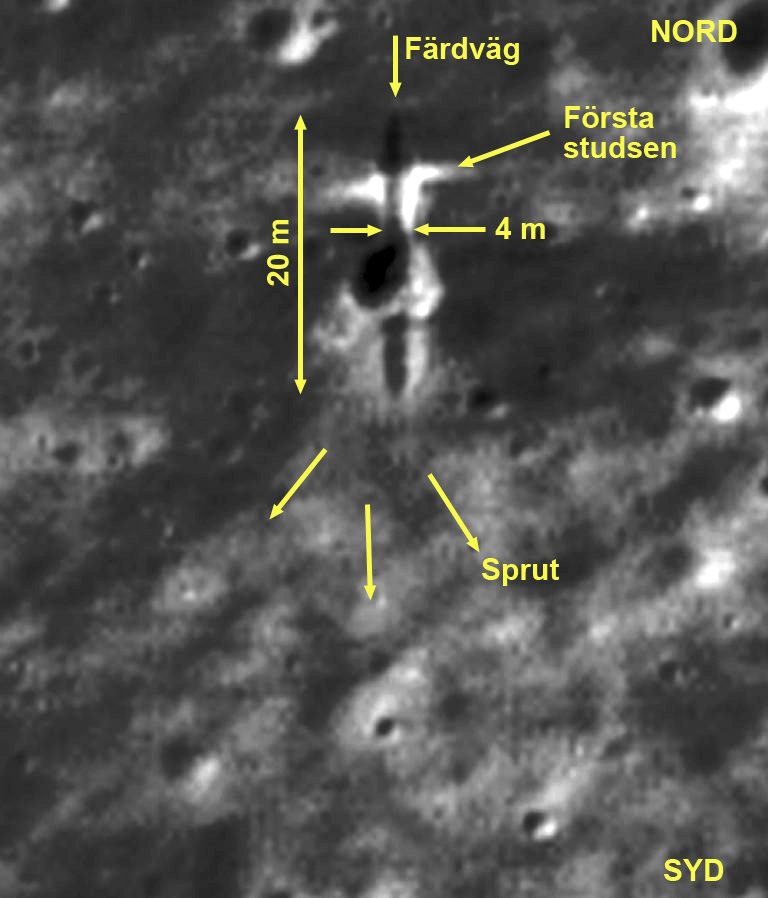
Här är LRO-bilden som visar nedslaget ned på meternivå. Det är kanske uppenbart att en satellit som slår i månytan i väldigt flack vinkel skapar en avlång krater. SMART-1 kom in norrifrån och har studsat en gång och slagit upp lite vitt månmaterial, som visat sig vara väldigt intressant att studera, eftersom det är färskt, till skillnad från det miljarder år gamla dammet på sidorna. Satelliten har plöjt tvärs igenom en naturlig krater och stannat i södra delen av spåret och kastat i väg tre strålar av sprut söderut.
SMART-1 är slutligen funnen.
Slutsats
SMART-1-projektet lyckades. Jonmotorn fungerade precis som avsett. Man kan dock konstatera att jonmotorer med den minimala kraft som kan utvinnas med solceller inte är särskilt lämpade för att exempelvis transportera människor till Mars. Det finns dock planer på betydligt större jonmotorer på flera megawatt, som då skulle drivas av kärkraftverk.
Mycket av kunskaperna som utvanns, handlade om hur man mäter in en satellitbana exakt, hur man sköter om en jonmotor korrekt och hur man gör bankorrigeringar med så liten dragkraft. ESA verifierade sin förmåga att förutsäga detaljer i banorna, och då särskilt den höga precision man kunde förutsäga nedslaget med.
Projektet gav dessutom en del bonus. Det intressanta faktum att man fann kalcium på månen innebär att råvaran till cement finns där, vilket i sin tur innebär ett lyft för byggande av hållbara bostäder på månen. Numera vet vi att det finns vatten på vår närmaste granne i rymden, och cement och vatten, det är grunden till vår moderna civilisation.
Man kan också spekulera så här: Väldigt många människor arbetade med att ta fram farkosten, utvann de nödvändiga dyrbara metallerna ur jordskorpan, gjorde banberäkningar, tillverkade halvledare, sköt upp med stort besvär, toppen av mänsklig uppfinningsrikedom och så pang rände den in i ett berg på månen och där kommer de utspridda bitarna att få ligga orörda så länge människorasen finns kvar, sannolikt ända tills universum går under härnäst.
Läs mer
SMART-1 hos ESA: http://sci.esa.int/smart-1/
SMART-1 hos OHB: http://www.ohb-sweden.se/smart-1
Jonmotorer med halleffekt: https://en.wikipedia.org/wiki/Hall_effect_thruster
European Planetary Science Congress 2017: https://www.epsc2017.eu/
Om satellitnavigation: http://www.idg.se/2.1085/1.392277/alla-har-rad-med-en-svensk-satellit
Voyagers instrumentering: http://www.idg.se/2.1085/1.381514/voyager-har-snart-sett-allt
Kolonisation av Månen: http://www.idg.se/2.1085/1.500569/snart-kan-du-och-jag-bo-pa-manen
Snabbdata om SMART-1
Farkosten
Drifttid: 3 år
Uppskjutning: 27 september 2003, med Ariane 5G från Kourou
Massa vid uppskjutning: 367 kg
Mått: 157×115×104 cm plus solpaneler
Störtning: 3 september 2006, 05:42:22 UTC
Datorsystemet
Utvecklades av Rymdbolaget
Processor: ERC32 med 20 MHz klockfrekvens
Minne: 2 MB EEPROM, 3 MB statiskt RAM, 4 GB lagringsminne
Nätverk ombord: CAN-buss till periferienheter
Telemetri
Antenner: 2 rundstrålande antenner, en riktantenn (MGA)
Nedlänk: S-band 2235,1 MHz, 5 watt uteffekt
Kapacitet: 2,06 kbps / 33 kbps
Upplänk: S-band 2058,15 MHz
Kapacitet: 2 kbps
Jonmotor
Typ: SNECMA PPS-1350-G
Accelerationsspänning: 350 volt
Strålström: 4,28 ampere
Xenonflöde: 5,4 mg/s
Dragkraft: 0,089 N vid 1,3 kW eleffekt
Specifik impuls: 1706 s





