Vill du leka med modellbåtar, i modelloceaner och skaka om dem med modellvågor? Följ med till norska Marintek och träffa folk som har det som arbete.
Det mesta kan simuleras idag, allt från rymdskepp till hjärnans neuroner, men när sambanden blir för komplicerade, eller vi rör oss med för många okända faktorer på en gång, då går det inte att simulera längre. Varför välter en oljeborrplattform? Hur höga vågor tål en tanker innan den kapsejsar? När slits en ankarkätting av? Vilken vinkel ska vågorna ha för att åstadkomma mest skada på en fartygssida?

Det enda sättet är faktiskt att modellera alltihop i 1:50 och prova, havet, vågorna, fartygen, stormen och havsströmmarna. Det är det som norska marinforskningsinstitutet Norwegian Marine Technology Research Institute, mera känt som Marintek i Trondheim arbetar med. I en modellverkstad som inte är av denna värld bygger man allsköns modeller av fartyg och plattformar och sedan utsätter man modellerna för elementens raseri.
Sedan denna artikel skrevs har Marintek gått samman med norska SINTEF Fisheries and Aquaculture och kallas numera SINTEF Ocean. Trots namnbytet är forskningsfaciliteterna desamma.
En vågbassäng på 50 x 80 meter med höj- och sänkbar botten ser man inte varje dag. Stormmaskiner, våggeneratorer som kan göra flerdimensionella havsvågor och en verkstad där man tillverkar jättemodeller av oljeborrplattformar och stora tankfartyg, och sen försöker blåsa dem i sank, ser man inte heller så ofta. Så titta nu, när Marintek visar upp sin unika verksamhet.
Raseriet i fråga åstadkoms i oceanbassängen där man kan simulera allt från en ljuv kvällsbris till tiotusenårsvågen. I den 260 meter långa släpbassängen alldeles intill kan man dra en modell framåt genom valfritt vågmönster för att se bogvågor, aktersvall och eventuella problem vid hög fart i hög sjö.
Några exempel på vad man kan forska kring är sjövärdighet, manövreringsförmåga, fasta och flytande strukturer, ankringssystem, havsbaserade energisystem, flytande öar, offshore-lastsystem, flytande produktionssystem, marina driftsystem, system, drift och pipelines under vattnet.
Givetvis gungar man inte på båtarna för ögats nöje, utan för datorernas och analysprogrammens. I vartenda hörn står rackar med mätförstärkare och loggutrustning från tyska Hottinger Baldwin Messtechnik (HBM) som samlar in, digitaliserar och loggar data.
Hårda kvalitetskrav
Jag blev mött av HBMs representant på Værnes, Trondheims flygplats. Han var lite nervös:
– Marintek är hårda grabbar. De valde oss för att vi lyckades så bra med Airbus 380. Antingen sitter våra förstärkare i rackarna nu, eller också ligger de i containern.
Snön knarrar under fötterna när vi går över gårdsplanen, på helspänn. Plötsligt får någon syn på oss genom ett fönster.
– Kolla, där är killen med förstärkarna!
Väl innanför dörren ändras tonen:
– Se inte så nervös ut. Hade du väntat dig att grejorna skulle ligga i containern? Lugn. Vi gillar dina ’stärkare.
Ett visst mått av ryggdunkning uppstår och vi går lättade genom lokalerna i jakten på fartyg att sänka och borrplattformar att välta.
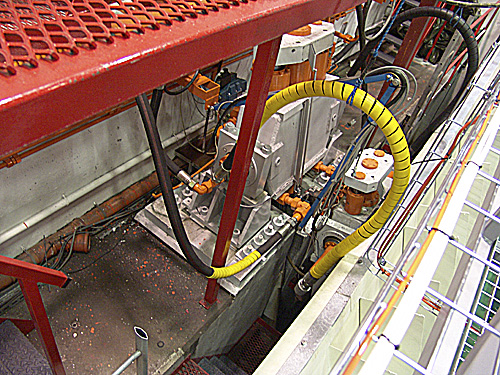
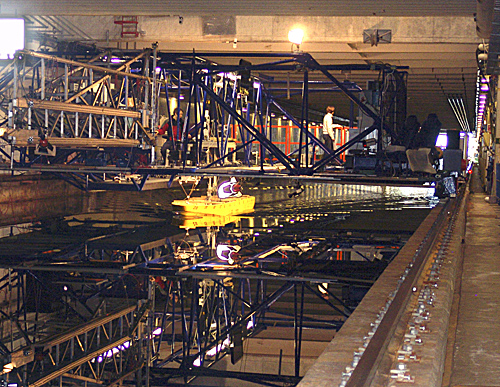
Sen blev vi insläppta i stora hallen, varvid åtminstone min haka föll nedåt ett par centimeter. En jättebassäng, flera traverser som svävade över den och fartygsmodeller på hyllor runt omkring. Längs en sida stod enorma, gula, svetsade strukturer, modeller av förankrade oljeplattformar. Och på en mycket lång bänk låg vad som såg ut att vara en 32 meter lång gul slang, men som i själva verket var en modell av en ”riser”, en flexibel olje- eller gasledning som kommer upp från havsbotten och kan vara en hel kilometer lång i verkligheten. Här tar man modellbygge på allvar!

Med undervattenspumpar kan man åstadkomma vattenströmmar på upp till 0,3 meter per sekund, men storm behövs också för realisiska förhållanden. Detta fläktbatteri svarar för elementens raseri över vattenytan.

Bassängens djup kan varieras från 10 meter ned (upp) till noll. Olika djup behövs när man ska studera hur krafter och vågor uppstår i grundare vatten. Djupet noll är dock bara användbart när man ska bygga om något på bassängens botten, till exempel ställa dit en bottenfast konstruktion. Bassängbotten är egentligen flytande och hålls nere med vajrar som sitter fast i ett hydraulsystem som kan sänka och höja bassängbotten. Det är rediga grejor. Vajrarna är 10 centimeter i diameter och hydrauliken kan bara flytta botten 3 meter på en timme.
När konstruktionen är fastsatt och botten nedsänkt tar det för lång tid att höja den igen för att göra en smärre ändring. Därför är åtta av medarbetarna på Marintek också utbildade som yrkesdykare.
Vågmaskin med 144 skovlar
Det upprörda havet skapas el-hydrauliskt. Den ”svåra” vågmaskinen har 144 skovlar som kan styras individuellt efter ett datorprogram och åstadkomma i stort sett vad som helst. Skovlarna kan arbeta parallellt, skapa olika typer av interferensmönster eller arbeta fasförskjutet och på så sätt rikta en eller flera vågfronter hur som helst.
Längs en vägg av bassängen sitter en vågmaskin med 144 skovlar som styrs elektriskt-hydrauliskt. Alla skovlar kan röras oberoende av varandra och åstadkomma mycket komplicerade vågmönster.
Vad kan man göra för skojigt med en sådan? Det går att få två vågtåg att krocka i mitten av bassängen till exempel och spruta rakt upp. Det har man inte mycket nytta av eftersom sådant inte kan förekomma i verkligheten, men rent tekniskt är det intressant.
Så här ser ett av de 144 hydrauliksystemen ut. Det rör sig om stora krafter när man ska skovla vatten fort.
De små skovlarna är snabba och kan ge vågperioder på cirka 0,6 sekunder, men inte särskilt starka. Vågorna kan inte bli högre än 40 centimeter. Längs väggen intill sitter den stora vågmaskinen som bara har två skovlar, en i vattenytan och en, en bit under vattnet. Den har mera kraft och kan göra vågor som är nästan en meter höga.
Den stora vågmaskinen har två skovlar lika långa som hela väggen. En sitter i vattenytan och en annan längre ned. De kan bara göra raka vågor och kräver betydligt kraftigare hydraulik. Bilden visar en av flera hydraulikstationer.
Vågmönstren genereras i en särskild applikation där man sätter samman olika grund- och övertoner till önskat vågmönster. När vågorna används, mäts de dessutom alldeles invid modellen med våghöjdsmätare, för att man ska se att man fått rätt sorts vågor.
Våghöjdsmätaren är av enklast möjliga konstruktion, nämligen två rostfria pinnar som står upp från botten. Vattnet är ledande och man mäter helt enkelt resistansen mellan pinnarna. När det kommer en våg, stiger vattenytan tillfälligt och resistansen sjunker. As simple as that.
Inget får studsa tillbaka
När man nu lägger ned så mycket jobb på att generera fina vågmönster skulle allting ändå vara förstört om vågorna studsade tillbaka från motstående sida i bassängen. Det skulle ge interferenser och ett i stort sett oförutsägbart vågmönster. Därför har motstående bassängkant en lutande strand som absorberar vågenergin, precis som vilken badstrand som helst, ungefär som när man satte ett 50 ohms avslutningsmotstånd i änden på nätverkskabeln i gamla typer av Ethernet för att inte få studsar och stående vågor i kabeln.
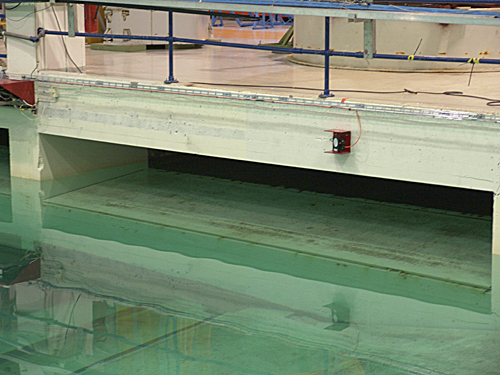
För att vågorna inte ska studsa tillbaka från motsatta bassängkanten och orsaka oväntade interferenser, har denna en absorberande strand där vågornas energi tas upp och förloras. ”Stranden” finns inne under golvet.
Vågorna de gå uppå böljorna de gröna – provning
Med sol, vind och vatten på plats är det dags för Marintek att göra det jobb de får betalt för. För vad köper kunderna? En kund överlämnar en CAD-ritning på ett fartyg och vill helt enkelt veta om det tål de sjöar som var avsett, om det kommer att kränga för mycket, om kraften i ankarkättingen blir för stor och så vidare. Och när man fått svaret på det, brukar man fortsätta att be om nästa tjänst: hur ska vi förändra fartygets form för att resultaten ska bli som vi vill? Mindre aktersvall, stabilare gång eller bättre positioneringsnoggrannhet?
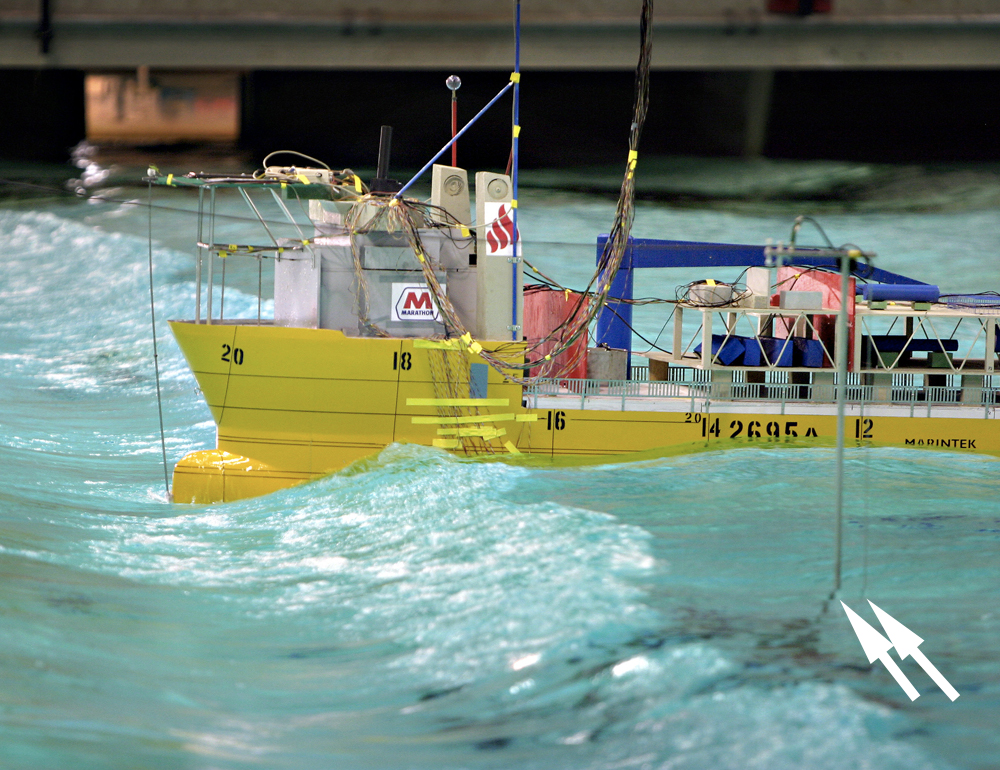
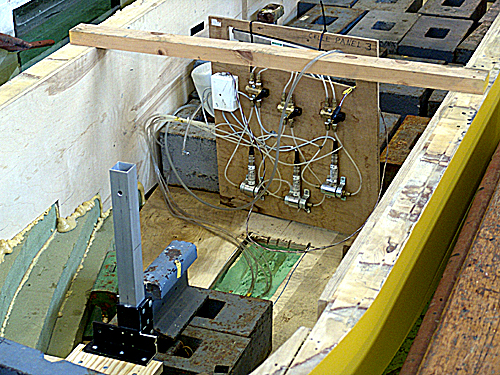
Här provas en ankrad oljeutvinningsstation i sjögång. Du ser hur stammen med mätkablage går rakt upp till mätplattformen som finns utanför bild. Ett antal ledare är tejpade på fören och ska ned till sensorer under vattnet.
I förgrunden sticker våghöjdsmätaren upp ur havet, vid de vita pilarna.

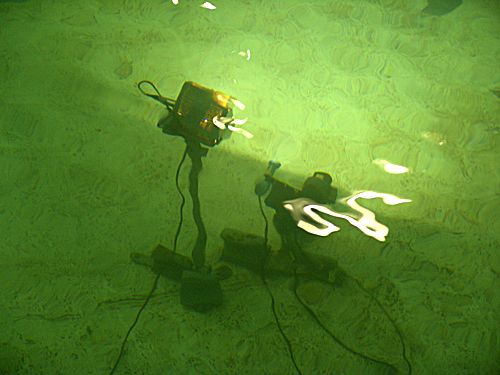
Detta är samma utvinningsstation under vattnet. De gula stigarrören där oljan kommer upp går rakt ned och ankarkättingarna ut åt sidorna. De gula ringarna är töjningsgivare, till exempel vid pilen. Den andra pilen visar de lokala våghöjdsgivare som hänger ned från fartygssidan.
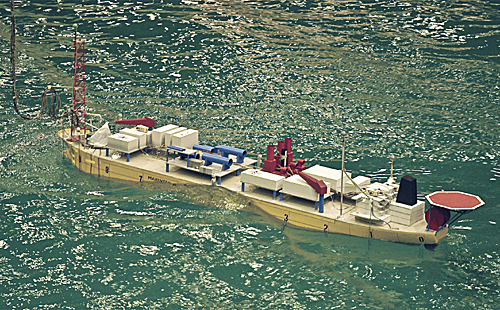
Ett typiskt resursfartyg för nordsjöarbete med helikopterplattform baktill, provas.
Här provas en typisk oljeplattform i hög sjö. En del av Marinteks röda mätplattform som hänger i travers, syns upptill i bild. De blanka pinnarna som hänger ned från plattformsmodellen till vänster mäter den lokala våghöjden i förhållande till plattformen. Den är inte nödvändigtvis densamma som våghöjden som mäts från bassängens botten, beroende på plattformens egenrörelse som inte nödvändigtvis är i synk med vågorna.
Ett provfartyg har utrustats med sex tryckgivare för ett släpprov. Slangarna från tryckgivarna slutar på olika ställen på skrovets utsida och utgör sk pitotrör. Runt omkring ligger diverse järnklumpar som används för att tynga ned fartyget till normalt djupgående. Du ser också det gröna byggnadsmaterialet och det gulaktiga fogskummet som håller ihop det.
Risers högre än Eiffeltornet
Men fartyget är bara en del av problemet. Ankarkättingar på en kilometer och lika långa risers, alltså rör där oljan eller gasen kommer upp och elektricitet går ned på kabel och information transporteras på glasfiber, är den andra delen. Sådana fantastiskt långa kedjor och rör lever ett eget liv i det upprörda havet. Kättingarna kan väga många hundra ton och vågrörelser i dem är svåra att beräkna matematiskt. De påverkas dessutom av havsströmmar. Provningar av risers går ut på att se till att de, även om de är flexibla, åtminstone de sista 200 metrarna just under vattenytan, inte utsätts för så stora krafter när det stormar, att de bryts av. Det rör sig trots allt om stålrör.
En riser är som en svängande gitarrsträng. Vattnet som strömmar förbi risern ger upphov till så kallade avlösningar, små virvlar som uppstår först på den ena sidan och sedan på den andra. Om virvelavlösningarna uppstår med samma frekvens som riserns egenfrekvens uppstår resonans och därmed stora svängningar. Fenomenet kallas VIV (vortex-induced vibration), se till exempel https://en.wikipedia.org/wiki/Vortex-induced_vibration. Man kan montera spiralliknande strukturer som kallas ”strakes” utanpå risern för att förhindra VIV. Marintek gör ofta prover med olika typer av strakes för att uppskatta livslängden till följd av materialutmattning. Mer om strakes: http://www.vivsolutions.com/products/helical-strakes/

Vi landkrabbor ser mest strakes ovan vattnet, i toppen av skorstenar, sk Scruton strakes. Bild: StromBer, CC BY-SA 3.0
Riserna kommer ofta nära varandra under en plattform, varvid det också kan uppstå riserkollisioner, ett annat ämne som Marintek också provar.
Kontrollrummet
Uppe i kontrollrummet kan vi göra vilket oväder som helst. Ska det vara Mexikanska golfen i orkan? Trollfältet när vinterstormarna ryter? Ett par rediga svall mitt på Atlanten som sänker ditt lilla containerfartyg? Säg till bara så ordnar vi det.

Här står vi i kontrollrummet ovanför oceanbassängen. Härifrån programmerar och övervakar man strömmar, vindar och vågor, startar och stoppar mätningar och modellens framfart över ”oceanen”, kan köra arbetstraversen och får in mätresultaten.

Marintek förfogar över mycket avancerad kamerautrustning för både över- och undervattensfotografering. Bilderna kan läggas upp på videoväggen i kontrollrummet om försöksledaren så önskar.
Släptanken
Vägg i vägg finns ett annat underverk, en 260 meter lång och 10 meter djup tank där man kan släpa fram fartygsmodeller genom olika vågmönster för att se hur de bär sig åt under framdrift, acceleration mm. Man mäter också tryck på skrovets olika delar och kan utsätta modellen för vågor på upp till 0,9 meter medan den släpas fram i upp till 8 meter per sekund.
Släptanken är den äldsta av Marinteks anläggningar. Den byggdes redan på 1930-talet och existerade alltså när tyskarna ockuperade Norge under andra världskriget. Då användes den till att förvara spannmål i. Nu förvarar man vatten i den.

Släptanken är 260 meter lång och tio meter djup. Det går järnvägsräls längs hela tankens kanter och på denna kör man en 20 tons mätplattform som släpar fartygsmodellen framåt med en toppfart på 8 meter per sekund.
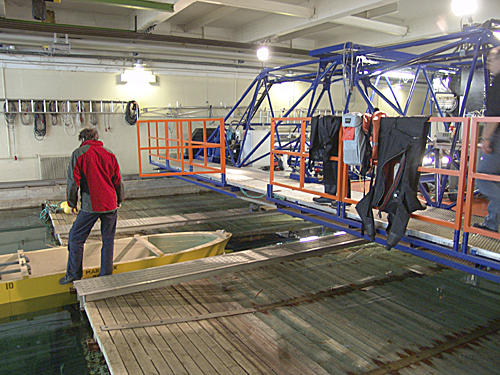
En fartygsmodell som försetts med sensorer, bogseras ut från inmätningsbassängen och förtöjs i mätplattformen. Träbryggan i förgrunden följer inte med på färden.
Uppe på mätplattformen finns ett bekvämt mätlabb med all tänkbar mätutrustning, kraft, styrning osv. Fartyget ligger i en grav till vänster utanför bilden, utanför det blå fackverket.
HBMs mätutrustning är allestädes närvarande hos Marintek, även så på släptankens mätplattform.
Här släpas en fartygsmodell framåt i tanken, utan pålagda havsvågor. Man kan se svall och vågrörelser och exempelvis mäta trycket på olika ställen runt skrovet. Plattformens fart, avstånd mm mäts med laser.
Tjockvatten?
Blir inte vatten för tjockt, kan man fråga sig, när en båt skalas ned 100 gånger? Borde inte vanligt vatten för modellen vara som sirap för fullskalefartyget?
Jo. Så är det och det kan man kompensera för. Naturligtvis blir alla rörelser modellen gör lite för tröga i förhållande till verkligheten, men i skalor ned till 1:100 eller 1:120 är effekterna någorlunda linjära och man har fullständig koll på det. Det finns erfarenhetsmässiga skalfaktorer som man kan applicera på alla mätvärden för att få slutvärden som stämmer mot verkligheten. Vid mindre skalor än så börjar ytspänningen att ställa till problem.
Ett annat skaleringsproblem är att kablaget från sensorerna stör fartygets uppförande. En kabelstam som är en centimeter tjock i modellen blir till en en meter tjock kopparstång när den skaleras upp hundra gånger. Man försöker kompensera för detta genom att lägga den i slingor och hänga upp den allmänt fjädrande, men den bästa lösningen vore trådlös överföring. Det är ett framtidsprojekt man jobbar på. All instrumentering, dvs både sensorer och mätförstärkare, loggar mm, ska i framtiden ligga ombord i modellen och bara de färdiga digitala värdena överförs trådlöst. Det gör det också lättare att flytta modellen till en annan bassäng och fortsätta mätningen där. Att koppla loss 200 mätledningar och få tillbaka dem rätt på nästa ställe är inte alltid så nöjsamt.
Vad mäter man?
Man kan i princip mäta allt som rör sig i bassängerna. Fartygsmodellerna hängs fulla med sensorer. Upp till 200 stycken har använts i extremfall. Det kan röra sig om rodervinklar, vattentryck, våghöjd, gung, stamp och gir och förflyttning i X-, Y- och Z-led, det man normalt kallar ”six degrees of freedom”, eller 6DOF. Har modellen en egen motor kan man mäta varvtal på denna och propellerns uppförande.
Dessutom mäter man hela tiden fartygets position i bassängen med ett antal mätkameror.

I varje hörn av bassängen står ett batteri mätkameror som ser och mäter in riktningen till fartygsmodellen, genom att belysa med infrarött ljus och titta på reflexer från pålimmade kattögon. Därefter kan man beräkna fartygets position i X- och Y-led. Notera att kameraobjektiven är svarta, försedda med infrarödfilter. Kamerorna är svenska och kommer från göteborgsföretaget Qualisys.
Slammingkrafter är också viktiga att mäta. De är stötkrafter som uppstår när en våg träffar en skeppssida. Tittar man på en gammal båt ser man hur sidoplåtarna är buckliga och intryckta så man kan se båtens skelett. Så går det när havet slår emot sidorna många hundratusentals gånger.
Datainsamling en masse
När man ska samla in mycket mätdata i industriformat är det lämpligt att all mätutrustning är likadan överallt, så att man kan flytta mätprogram och parameterlistor fritt mellan installationerna. När personalen väl har kört in sig på ett fabrikat och är nöjda med det, kan det bli kostsamt att byta.
Det underlättar också om utrustningen är av rock-solid-kvalitet och när Marintek har använt sig av HMBs grejor i 25 är så beror det just på den absoluta tillförlitligheten. Apparaterna mäter det de ska, när de ska.
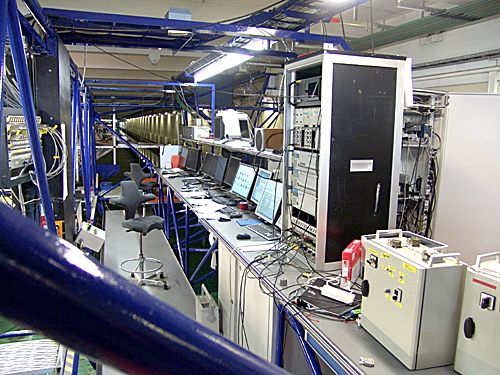
Datainsamlig i oceanbassängen sker från en hängande mätplattform som släpar, eller kan följa, modellen runt i bassängen, i en X-Y-travers.
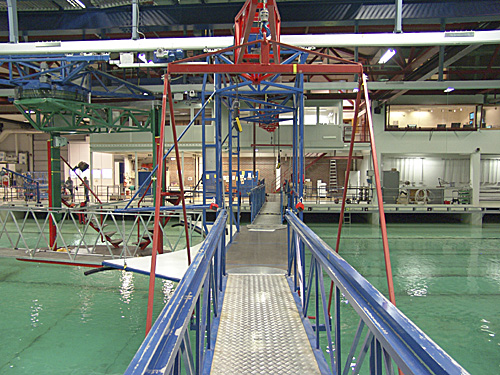
Fartygsmodellerna följs, eller släpas, från en arbetsplattform som hänger i en travers som kan röra sig över hela bassängen i upp till 5 meter per sekund. Här har vi gått ut på plattformen när den hänger mitt över bassängen, och står och tittar in mot land.

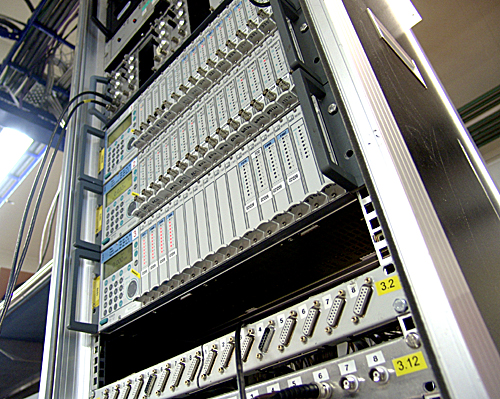
Så här ser det ut ute på mätplattformen. Den är inte så stor, kanske 4×5 meter. Mätdata samlas in genom HBMs mätförstärkare (nederst i racken) och loggas i loggdatorn i HBM-utrustningen. Den lokala styr-PCn är en industri-PC (svart).
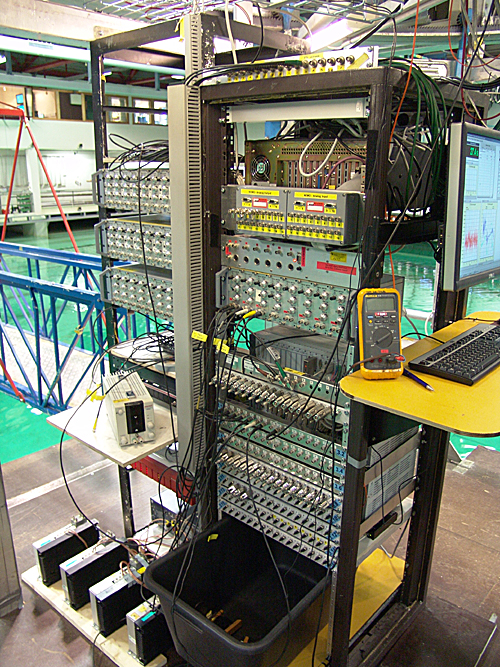
På andra sidan förstärkarracken sitter indatamodulerna. Det är här man ansluter givare och filtrerar signalen, korskopplar mm.

En närbild på de sköna bandpassfiltren i mätracken.
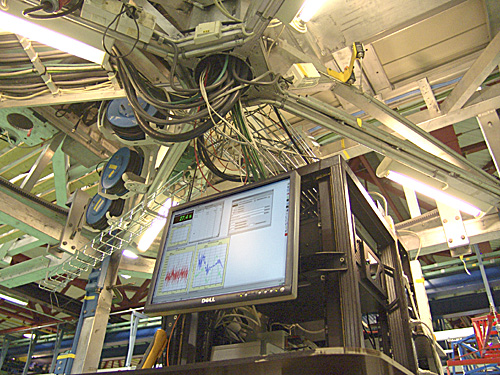
I taket ovanför mätracken trasslar sig en härlig kabelhärva. Här kommer all kabel in som går via traversen tillbaka till land.

Arbetsplattformen följer normalt fartygsmodellen längs en förprogrammerad rutt, men vill man, kan man sätta sig i förarstolen, ta tag i joysticken och fara runt på egen hand.
HBMs mätförstärkare MGCPlus samlar in mätdata

Som journalist måste man plåga leverantörerna en smula. Det är en plikt. När vågorna tillfälligt stannat och vi tar en kopp java frågar jag Marinteks mättekniker:
– Vad tycker ni om HBMs utrustning
HBMs representant:
– Ska jag gå ut då?
– Nej (hähä), du ska sitta här och ta emot kritiken!
Fast så allvarligt är det inte. Snarare tvärt om.
– Alla är eniga om att HBMs maskinvara är den bästa som finns att få på marknaden. Instrumenteringspersonalen är begeistrad över kvaliteten. Med 24 bitars upplösning blir det minimalt brus. Och när det blev dags att skaffa ett nytt dataloggsystem efter det gamla Coda från Hewlett-Packard som vi använt i 15 år frågade vi olika konkurrenter. I slutänden valde vi HBMs Catman Enterprise eftersom det till exempel erbjuder tre olika samtidiga samplingsfrekvenser samtidigt i samma mätning. Det är det ingen annan som kan.
En av Marinteks medarbetare kom ned till HBM i Darmstadt och fick se Catman Enterprise och han blev så upphetsad att han bara sa ”Den måste vi ha!” när han kom hem igen.
En mycket stor fördel är att man kan köra Catman utan att ha en MGCplus ansluten. Sålunda kan man sitta på sitt kontor och skapa listor med mätkanaler i förväg. Efteråt kan man ladda in listorna i den verkliga mätutrustningen och trycka ”Play” och börja mäta.
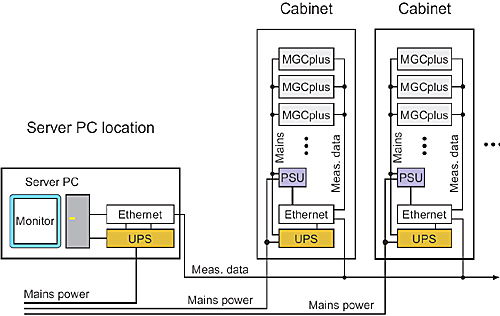
MGCPlus-lådorna är internt organiserade som ett antal inpluggbara enheter som hamnar på en och samma spänningsbuss som strömförsörjs från en intern UPS (avbrottsfritt kraftaggregat). Allt mätdata samlas ihop av en central controller, loggas och hamnar på Ethernet. Hur många racklådor som helst kan användas i ett mätsystem. Centralt har man en värddator som kör styrprogrammet Catman Enterprise (mera nedan).

MGCPlus kan konfigureras hur som helst, med 8 eller 16 tillsatskort för analog I/O, digital I/O, frekvensutmatning, mätning på trådtöjningsgivare med drivspänning till bryggan, Pt-100, termoelement, ändlägesswitchar, CAN-buss, Profibus, RS-232, RS-485, induktiva givare, piezoelektriska givare, potentiometrar, med mera. Och räcker inte en racklåda kan man koppla ihop och synka flera tillsammans. Samsynknigen är viktig om man vill kunna sampla en större mängd värden samtidigt.
Loggsystem
– Förra loggsystemet var Coda från Hewlett-Packard och detta använde bara 16 av de tillgängliga 24 bitarna i HBMs utrustning. Allt eftersom började personalen bygga specialiserad programvara för HBMs A/D-omvandlare och HBM-utrustning kom in på allt fler ställen i laboratorierna. För två år sedan skulle Coda-systemet definitivt ersättas och Marintek tog kontakt med flera olika leverantörer av dataloggers. Efter en lång urvalsprocess fann man att MGCplus tillsammans med programmet Catman Enterprise var det som stämde bäst överens med specifikationerna.
Kunderna kan sitta vid en klientterminal i vårt kundrum och se ett fåtal mätkanaler, dock utan att kunna förändra några värden. Inte nog med det. Kunderna kan också sitta någon annan stans på Internet och det är en stor fördel.
Det är också en stor fördel att ha samma utrustning i alla laboratorier. Om man gör försök i olika laboratorier så känner man igen sig. Det kan hända att en modell först körs i släptanken och sedan i oceanbassängen och då är det (relativt) enkelt att bara koppla loss den från mätutrustningen, ta med sig modell och kanallista och koppla in allt i nästa mätrack. Mätningarna blir likadana oavsett var man mäter.
Catman Enterprise
HBM har en historik att visa upp som inte är av denna värld. När en kolfibervinge till Airbus 380 överbelastas kommer den att explodera. Kolfiber bär sig inte åt som aluminium, som spricker om krafterna blir för stora, utan följden blir en katastrofal implosion, eller explosion, beroende på hur man ser på det. För att säkerställa att de nya vingarna klarade nödvändiga krafter applicerade Airbus hela 10.000 trådtöjningsgivare på dem. HBMs mätsystem Catman var det enda mätsystem som kunde samordna så stora mätningar och göra mätjobbet till hanterbara delprojekt.
Det var det där med möjligheten till delprojekt som Marintek hakade på. Catman Enterprise används till att utvärdera allt mätdata efter ett våg- eller släpförsök. Programmet styr hela arbetsflödet i försöken. Det mäter olika värden i modellen och efteråt kan man skapa beräknade kanaler genom att utföra beräkningar på flera insamlade mätkanaler.

HBMs mätrackar är centrala i hela Marinteks mätverksamhet. Ett MGCplus racksystem är uppbyggt av en masterlåda och flera slavlådor. Alla samlar in och förstärker mätdata från till exempel trådtöjningsgivare, trycksensorer och annat, varefter data digitaliseras och förs över till masterlådan där det loggas av loggdatorn CP 42. Därifrån kan data hämtas till Catman Enterprise för visning och vidare behandling. Det är också Catman Enterprise som levererar de initiala mätparametrarna till mätracken. Parameterlistorna kan sättas samman vid klientarbetsstationer och data sammanställs sedan i Enterprise innan det går vidare till mätracken. En annan tillämpning för klientstationerna är att visa kunderna utvalda delar av mätdata, i realtid om så önskas.
En mycket stor fördel med Catman-systemet är att en komplex mätning med många mätkanaler kan delas upp i flera underprojekt så att flera tekniker kan arbeta med sin delmängd av kanaler och spara som ett eget projekt. Detta snabbar upp arbetet betydligt mot om man skulle tvingas arbeta samtidigt med alla, låt oss säga 50-200 kanaler som ett stort oceanprojekt kräver.
Det är också förmånligt att systemet kan sampla värden med flera olika samplingsfrekvenser samtidigt. Att sampla alla kanaler med högsta nödvändiga frekvens skulle ha givit orimligt stora datafiler. Nu kan man få ned filerna till optimal storlek och förkorta överföringstiderna.
Inte nog med att MGCplus används för att hämta in mätvärden, med utgångskort skickar man också startpulser för att starta videoinspelning av förloppet och synkronisera den klocka som spelas in på videobilderna. Våg- och vindmaskinerna får start- och stoppulser från MGCplus, men maskinerna i fråga drivs av en egen PC.
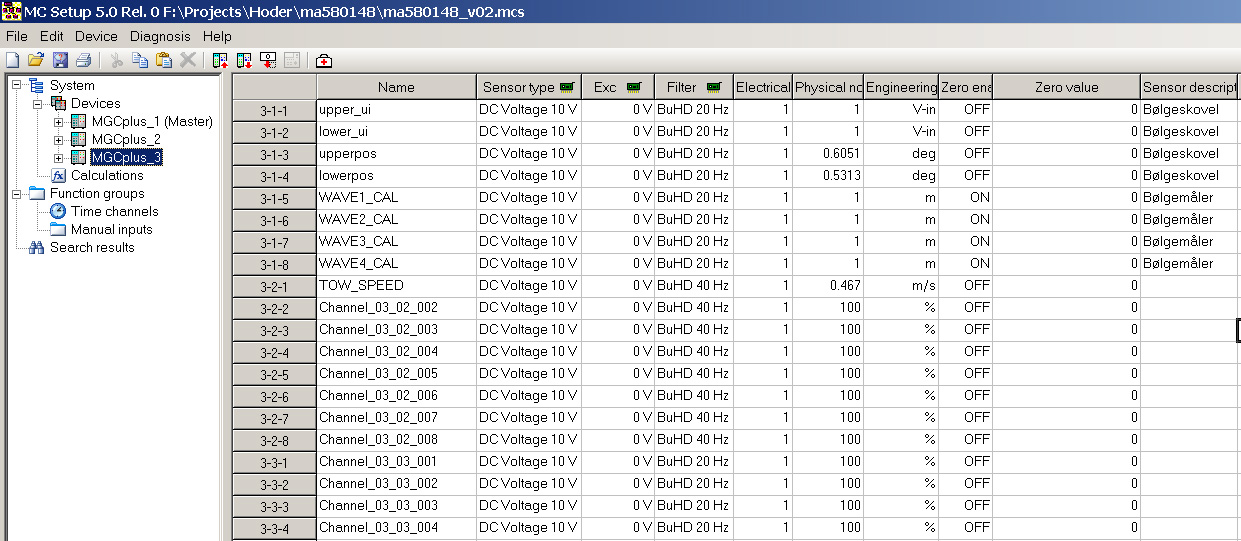
Styrningen av HBMs mät- och loggutrustning sköts med windowsprogrammet Catman Enterprise, där man kan namnge mätkanaler, bestämma deras parametrar, sätta nollpunkter och ange olika pass- och spärrfilter.
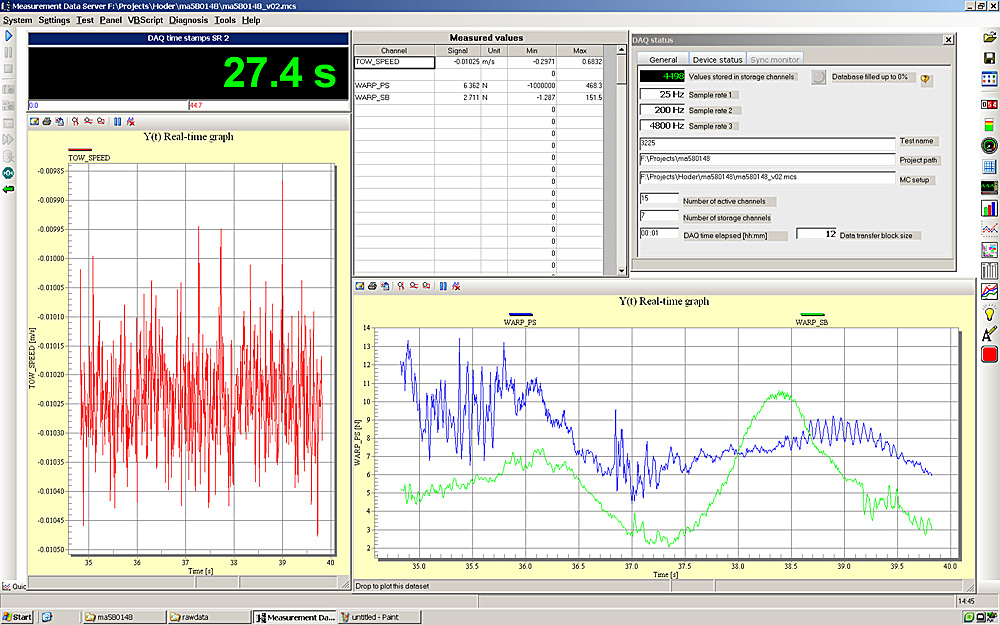
Resultatet i Catman blir en mätskärm som kan komponeras lite hur som helst. Här ser vi ett släpförsök med en djupvattenstrål. Försökets längd i sekunder visas, liksom ett antal vridkrafter.
Programvara som Marintek utvecklat
Marintek har utvecklat ett trettiotal programvaror för efterbehandling av data från bassängerna. Eftersom programmerarna på Marintek inte är blöjprogrammerare har de skrivit sina rutiner i Fortran. Låt oss bara välja ett exempel av det trettiotal program som finns:
MACSI (Marine Crane Simulation) är ett program för dynamisk analys av hur lyftkranar uppför sig vid undervattensarbete. Programmet utvärderar systemprestanda och tar fram driftbegränsningar, som bland annat:
- Hydrodynamiska krafter
- Rörelser i upprört hav
- Placering med stor precision
- Analys av kompensatorer för sjögång
- Hanteringsverktyg för dynamiskt positionerade moduler
- Icke-linjär analys
MACSI är ett PC-program för analys av drift av kranar till havs när ett föremål ska höjas eller sänkas genom vatten, ned till havsbotten. Programmet hanterar många olika sorters utrustning med olinjära egenskaper. MACSI kan beräkna kranens och föremålets rörelser över tiden, påkänningarna i kranvajern, såväl som styrkrafterna från en aktiv sjögångskompensator. Alla rörelser kan visas grafiskt.
Sensorer
Krafter och påkänningar på modellerna mäts oftast med trådtöjningsgivare. Trådtöjningsmodulen i sig själv är en liten orange plastbit med en tunn, laminerad metalltråd som sträcks vid mätningen. När tråden sträcks, höjs dess resistans eftersom tvärsnittsarean minskar. Normalt kopplar man givaren i en spänningssatt mätbrygga tillsammans med tre fasta motstånd och mäter skillnadsspänningen som uppstår över bryggan, istället för att försöka mäta en mikroskopisk resistansförändring över 15 meter långa ledare.
Givaren är mekaniskt för svag för att användas för sig själv. Den limmas alltid på en metallstruktur, som en pinne, ring eller stång, i vilken man kan fästa vajrar eller kedjor. Pinnen har en känd tvärsnittsarea och deformationskrafterna kan på så sätt kvantifieras.
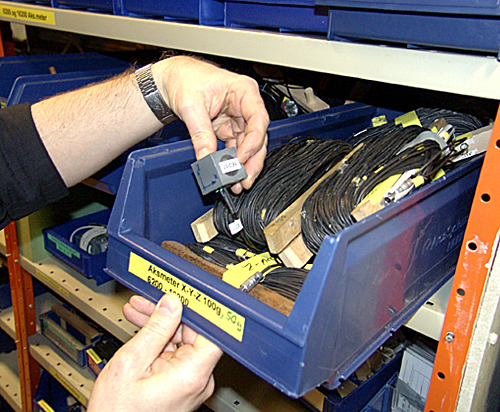
Marintek förfogar över ett stort förråd med sensorer av olika slag. I vissa tillämpningar kan det gå åt över 100 sensorer, som tryck, kraft, acceleration, våghöjd mm. Här ser vi en tvåaxlig accelerometer.
Den gula ringen är en töjningsgivare som används till att känna dragkrafter i ankarlinor mm. Ankarlinan kopplas på i ringens båda ”öron” och man mäter hur mycket ringen deformeras vid olika krafter.
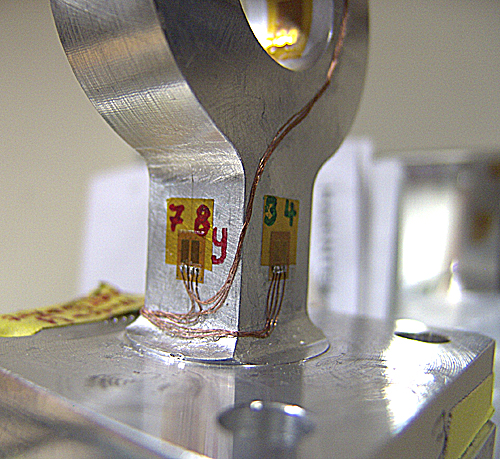
Här byggs en töjningsgivare. De orange ”frimärkena” är trådtöjningsmodulerna som sträcks när metallen deformeras. Efter att givarna limmats på och provats, målas alltihop med gul korrosionsbeständig färg. Just den här modulen har en platta i botten, så den är avsedd att skruvas fast på ”havsbotten”.
Avbildning
Avbildning av fartygets uppförande är viktig. Att i efterhand kunna se hur fartyget uppförde sig är precis lika viktigt som att kunna mäta sig fram till exakt hur många centimeter det gungade. Man kan inte mäta sig till om vågor slår in över däck, men det går bra att se på filmen.

Fartygens uppförande i bassängen måste registreras och avbildas. All avbildning sköts av en särskild fotograf med erfarenhet av undervattensfotografi. Han har en egen liten hytt alldeles intill stora bassängen.
Vad som händer under vattnet är mint lika viktigt som det som händer ovanför ytan. För att kunna fotografera kablar och ankarkättingar behöver man undervattensljus.

Här ser du lite av videoutrustningen som används för avbildning. Herrarna i roddbåten, som i princip är av samma storlek som en fartygsmodell, är ute på serviceuppdrag.
Byggverkstaden
Marintek ägnar sig åt seriöst modellbygge. Här bygger man inte för skojs skull och lite hipp som happ, utan modellerna byggs som exakta skalamodeller av de åsyftade fartygen, efter CAD-ritningar. Modellerna kan normalt bli upp till fem-sex meter långa, men en av de längsta har varit åtta meter! De byggs i grön cellplast och efteråt kläs skrovet in med gul, slät plast som ska likna ett målat stålskrov. Den släta plasten gör det också enkelt att skriva med tuschpenna, tejpa fast kablage och sätta på etiketter. (Beklagligtvis var modellerna som byggdes företagshemligheter, så dem kunde jag inte göra närbilder på, men femmeters modeller av tankfartyg är, hm, ”imponerande” är inte riktigt rätt ord…)
En mek- och lekverkstad för den modellsugne. Modeller av fartyg och plattformar framställs med industriella metoder. Här är det plåtverkstaden där man sätter samman fackverksstrukturer och liknande, huvudsakligen för modeller av borrplattformar och andra flytande strukturer.

Fartygsmodellerna framställs av sådan här grön skumplast som inte absorberar vatten. Plastbitarna limmas ihop med fogskum tills man nått tillräcklig höjd…

…varvid jätte-über-fräsmaskinen tar vid. Marintek har en femaxlig fräsmaskin som tar upp ett helt rum, och används till att direkt fräsa ut skrovformen ur det gröna plastblocket från en CAD-fil. Det blir mycket säkrare och noggrannare än om man byggt och filat för hand.

Eftersom fartygsmodellen blir alldeles för lätt, lastas den ned med olika typer av vikter i särskilda inmätningsbassänger med fönster under vattnet, så man kan se hur skrovet beter sig. Man använder till exempel sådana här bitar av järnvägsräls. Högar av järnvägsräls hittar man lite var stans i lokalerna.
Annan verksamhet
Kavitering är ett elände för sjöfarten, och direkt livsfarligt för ubåtar. När en propeller roterar sig så fort genom vattnet att det inte hinner ”rinna till” på propellerbladets baksida, bildas en vakuumblåsa i vattnet. När den faller ihop, imploderar, kommer vattnet rusande med sådan fart att det nöter bort, korroderar metallen i propellern. Därav namnet kavitering, efter det engelska ”cavity” som betyder grop. Kaviteringen kan gröpa ur ordentliga gropar i metallen, vilket till sist försämrar dess egenskaper.
Marintek har en jättelik kavitationstunnel, som i princip ser ut som en vindtunnel, med den skillnaden att den är full med vatten. Arbetstunneln har en diameter på 1,2 meter och där kan vattnet rusa fram med 18 meter/sekund. Propellern man stoppar in kan drivas upp till 3000 varv/minut med en 50 kilowatts motor.
För ubåtar är problemet att det uppstår buller när kaviteringsbubblorna imploderar, vilket är lätt att höra på avstånd, vilket sålunda avslöjar ubåtens position. Därför utformas ubåtspropellrar med långa slanka blad, som ska släppa vattnet så mjukt som möjligt. Men om Marintek har testat ubåtspropellrar i tunneln… Nej, nej, det kunde man inte påminna sig, trots att en vägg i provhallen är fullhängd med lustigt böjda propellrar.
Mer om kavitationstunneln: http://www.sintef.no/en/all-laboratories/cavitation-tunnel/
”Sloshing” och ”Swirling” är andra faromoment för sjöfarten, där mer grundforskning behövs. Fartyg som transporterar flytande naturgas har problem med att gasen skvalpar runt i tankarna vid sjögång. Uppstår oturliga resonanser i tankarna kan fartyget gunga för mycket eller vätskan slå sönder tankarna. Marintek forskar därför om hur man bygger lämpliga skvalpskott (membranes) för att minimera problemet med sloshing.
Mer om sloshing-labbet: http://www.sintef.no/en/all-laboratories/sloshing-laboratory/
Framtiden
Oljeutvinning pågår numera på väldiga djup och skulle man ha fått plats med hela ankarsystemet i en 10 meter djup bassäng, skulle modellen bli väldigt liten och skalfaktorerna skulle göra försöket overkligt. Istället använder man redan nu trunkerade system som är riktiga ned till ett visst djup. Därefter simulerar man resten av systemet med fjädrar eller andra passiva komponenter.
Ett framtidsprojekt är att börja använda aktiva komponenter för att simulera delar av modellen, eftersom en 50 meter djup bassäng inte är att tänka på. Man kommer att försöka koppla ett mätförsök, en modell, mot en mekanisk simulator. Antag att man till exempel behöver en ankarlina som borde vara 90 meter lång i modellen, men bara har 10 meter djup bassäng. Då får man fästa en motor i botten som simulerar sträcket i linan som uppkommer de resterande, virtuella åttio metrarna.
Motorn måste styras från en simulator som får indata från mätsystemet. Det fysiska laboratoriet kan alltså kopplas in på en virtuell modell. Indata till drivutrustningen kommer då att tas från utdata ur Catman-systemet.
Hoppas du har tyckt om besöket hos Marintek (SINTEF Ocean)? Jag tyckte om det. Marintek är ett oväntat fantastiskt ställe med så unik utrustning att man knappast finner den någon annan stans. Då är det ett privilegium att få vara teknisk journalist och få komma in och fingra på grejorna, fråga ut personalen och rita ett schema eller två. Betraktade var för sig kanske de ingående delarna, komponenterna, stålskovlarna, järnvägsrälsen och rören inte är så märkvärdiga, men satta i system och försedda med programvara och återkopplade mätningar blir helheten något alldeles extraordinärt. Den grundforskning Marintek bedriver kan helt enkelt inte utföras i programvara i en simulator. Skiftnyckel och silvertejp är vad som gäller.
Läs mer
Läs mer om SINTEF Oceans olika bassänger och labb: http://www.sintef.no/en/ocean-space/#/
Läs mer om HBMs mätutrustning https://www.hbm.com/en/ och sök på ”Mgcplus”
Läs om alla märkliga saker som kan hända under vattnet: http://www.sintef.no/globalassets/upload/marintek/review-1-2009/review_1_2009.pdf
Mer om kavitationstunneln: http://www.sintef.no/en/all-laboratories/cavitation-tunnel/
Mer om sloshing-labbet: http://www.sintef.no/en/all-laboratories/sloshing-laboratory/
Svenska Qualisys gör positionsmätkamerorna: http://www.qualisys.com/
Vortex-induced vibration: https://en.wikipedia.org/wiki/Vortex-induced_vibration
Karman Vortex Street, du har sett den många gånger, men inte tänkt på det: https://en.wikipedia.org/wiki/K%C3%A1rm%C3%A1n_vortex_street
Mer om strakes: http://www.vivsolutions.com/products/helical-strakes/
Snabbdata om SINTEF Oceans anläggning
Oceanbassängen
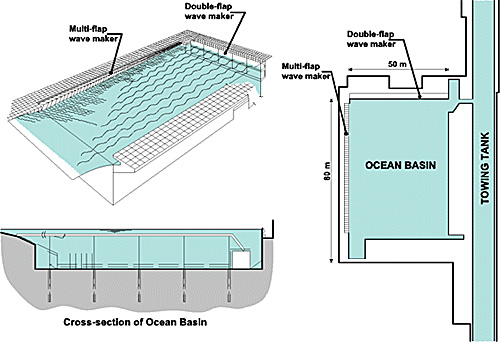
Oceanbassängen används både för grundforskning och för tillämpad fartygs- och offshoreforskning. Total simulering av miljön med vind, vågor och strömmar erbjuder unika provningsmöjligheter för alla typer av fasta och flytande strukturer. Tio meters vattendjup medger goda möjligheter till prov av djupvattenstrukturer, avsedda för framtidens offshoreindustri.
Längd: 80 m
Bredd: 50 m
Djup: 0-10 m
Högsta strömningshastighet cirka 0,2 m/s vid 5 meters vattendjup. Vid 7,5 meters vattendjup är den högsta strömningshastigheten cirka 0,15 m/s.
Vågmaskin med dubbla vingar
Hydrauliskt driven dubbelvinge med gångjärn.
Vanliga vågor: maximal våghöjd: 0,9 m
Vågperiod: 0,8 s och längre
Vågspektrum: Datorgenererat eller avläst från magnetband.
Vågmaskin med 144 vingar
Elektriskt driven med 144 individuellt styrbara vingar
Vanliga vågor: maximal våghöjd: 0,4 m
Vågperiod: 0,6 s och längre
Vågspektrum: Datorgenererade långa eller korta vågor i önskad riktning.
Traverssystemet kan följa självgående modeller utan begränsningar i hastigheter upp till 5 m/s i valfri riktning mot vågorna.
Släpbassängen
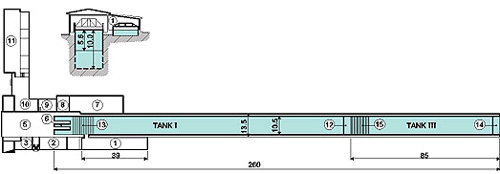
En 260 meter lång bassäng där modeller kan släpas med en mätbrygga i olika hastighet och olika krafter, tryck mm kan mätas samtidigt som modellen fotograferas och filmas. Släputrustningen har flera dynamometrar med trådtöjningsgivare för att kunna mäta släpkrafter, provning i öppen sjö och göra framdrivningsprover. Provutrustning finns för fasta och flytande strukturer, som kan mäta tryck, krafter och moment i sex axlar (6DOF) och förflyttning i sex riktningar.
Längd: 260 meter
Bredd: 10,5 meter
Djup: 10 meter
Släpvagnens totala vikt: 20 ton
Släpvagnens uppbyggnad: Fackverk med rör
Hjulbas: 11,04 meter
Hastighetsintervall: 0,02 – 8 m/s
Största acceleration: 1 m/s2
Drivmotorer: 4 tyristorstyrda likströms shuntmotorer
Modellens maximala längd: 8 meter
Vågmaskin med dubbla vingar för regelbundna och oregelbundna vågmönster
Maximal våghöjd: 0,9 meter
Vågperiod: 0,8 – 5 s
Vågornas maximala branthet: 1:10
Vågspektrum: Datorgenererat med maximalt 4000 sinusvågskomponenter
Snabbdata om HBMs mätutrustning MGCPlus
MGCPlus är en produktlinje med mätförstärkare, A/D- och D/A-omvandlare och loggutrustning med upp till 24 bitars noggrannhet. Listan nedan visar ett urval av de mätkort som finns att utrusta mätrackarna med:
- 4 elektriskt isolerade spänningsingångar
- Spännings- och strömingång för ±1 V, ±10 V, ±60 V och ±20 mA
- 4 elektriskt isolerade termoelement
- 4 strömmatade piezoelektriska givare för t ex acceleration
- 4-kanalig frekvensräknare upp till 500kHz
- 8 ingångar för ±10 V
- Flera olika ingångar för termoelement och trådtöjnigsgivare med givaridentifiering enligt T-ID (Transducer Identification)
- 8 ingångar för Pt-100-givare
- 8 ingångar för potentiometrar
- Anslutning till CAN-buss
- Anslutning till RS-232C
- Anslutning till RS-485
- 8 digitala in- och utgångar
- Anslutning till Profibus DP
- 10 analoga utgångar.
Och så där håller det på. Marintek har 28 MGCplus mätrackar med sexton kortplatser, några med åtta och några med tio mätkanaler.