En järnvägsolycka! Amatörer har varit ute och kört tåg.15 vagnar störtade av spåret och nedför en sluttning. Ingen skadades. Vagnarna var i skala 1:160. Vi har besökt den undre världen på Lidingö, fylld med rullande materiel, servoförstärkare, kilometervis med kabel, och ett gäng entusiaster som kör datorstyrda tåg från punkt A till punkt B och tillbaka igen. Kort sagt, en digital lekstuga.
Visst är det något visst med de små loken som rasslar sig fram över rälsen när du vrider på handtaget på transformatorn? Hallå där, stopp! Det var förr. Vad vi ser nu på MJ-rallarnas banor är små digitala reglersystem, mikrodatorer som bestämmer köregenskaper, rullande materiel med egna adresser som kan programmeras och kan svara. Kommandon går ut som digitala koder på rälsen och svaren kommer på samma sätt. Den blå märklintransformatorn med rött vred som du trycker på – bzzzp – för att köra baklänges, är borta för länge sedan. Nu är det korrekta accelerations- och bromsprofiler, varvande dieselmotorer, klingande klockor och korrekt tuffande ånglokomotiv.

Det är inte längre bara en rolig hobby för stora pojkar, det är ett avancerat styrsystem med mängder av inblandade signalmottagare och sändare, störningsproblem, ja kort sagt, allt som gör livet värt att leva.
Ned i den slamrande underjorden
En mörk man med underlig utländsk brytning möter oss utanför en anonym dörr i Bodals skola i Lidingö. Vi blir visade nedför en betongtrappa, in bakom en tjock ståldörr och in i det allra heligaste. För våra blickar brer ett enormt landskap ut sig, Ja, enormt om det hade varit i fullskala. Nu ockuperar Slamras cirka 100 meter spår, som skulle varit cirka 16 kilometer i fullskala, rum på rum i ett skyddsrum inunder skolan.
Slamra, Stockholm Lidingö American Model Railroad Association, har funnits sedan 1987 och bara byggt, limmat, lött och strösslat gräs sedan dess. Från början körde man som alla andra med analoga lok, alltså lok vars hastighet bestämdes av spänningen mellan rälerna, men det är för länge sedan borta och järnvägen är numera helt digitalstyrd. Den är av den anledningen vi är här.

Allt tillgängligt utrymme är upptaget med modelljärnväg. Disk och kaffekokning får stå tillbaka, eller iallafall skötas hukande.
Kafferummet är till höger och sen vänster och sen vänster igen och se upp för Slamra-tunneln. Givetvis ser jag inte upp, utan ned, och fastnar med kläderna i tunneltaket, orsakar en omfattande jordbävning i modellskala och delar av naturen faller ned på golvet.
– Jag sade ju att du skulle se upp!!
Vi pratar med Harald Barth som är banans digitalchef. Till vardags klappar han om superdatorerna på Kungliga Tekniska Högskolan i Stockholm, men nu har han iklätt sig rollen som modelljärnvägsrallare, spårpåsättare, lödnisse och oscilloskopförare.

Harald visar upp en del av en kommande skog. Trädet verkar lite stort för skala N, men det rör sig kanske om ett redwood-träd? I vilket fall som helst är det taget direkt ur naturen, i form av en strandväxt, torkat och sprayat med lämplig kalifornisk barrträdskulör.
Slamra har existerat sedan 1987, men fick lokalen på 80 kvadratmeter i skyddsrummet i Lidingö först senare. Klubben har alltid byggt en järnväg som gått att transportera och ställa ut. Från början var banan analog och uppdelad i olika strömkretsar. Då var man tvungen att manuellt hålla reda på vilken strömkrets som fanns var. Ungefär år 2000 blev det digitala styrsystemet tillgängligt, men klubben vågade inte lägga över driften på en gång utan man tog ett styrelsebeslut på att banan skulle kunna köras både analogt och digitalt. Sedan drog vi alla kablar som behövdes och så trodde vi att vi skulle kunna köra båda systemen, men det har aldrig hänt. Efter ett år gav vi upp och insåg att det analoga inte behövdes.

Harald och klubben har ofta deltagit på Hobbymässan. Här sitter han mitt i layouten, med en väska modelljärnväg bredvid sig, en portföljmonterad variant kallad N-case (fattaru? encase… hehe).
– Visst brukar ni åka och visa upp er på Hobbymässan ibland?
– Vi kör det digitala systemet både här i lokalen och på utställningar. Och inte bara Hobbymässan utan även utställningar på Sveriges Järnvägsmuseum i Gävle och olika endagsutställningar i samband med marknader, där handlarna gärna vill ha någon som kör tågen också, medan handlarna själva säljer dem.

Besök gärna Sveriges Järnvägsmuseum i Gävle. Se vidare: https://www.trafikverket.se/jarnvagsmuseum/
Om banan
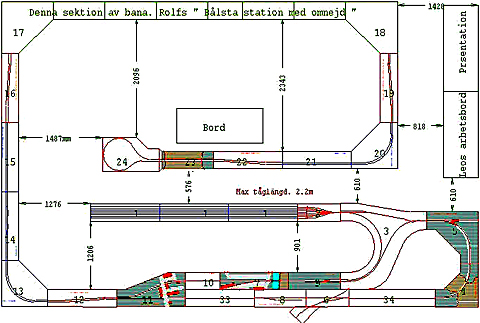
En av många tänkbara layouter. Denna är från Hobbymässan 2009.
Slamras bana är i skala N, 1:160 och är konstruerad med en huvudlinje som går genom alla rum. Omräknat i naturlig skala är denna linje 10 kilometer. Dessutom finns det ungefär hälften så mycket till i sidospår. Där finns några hundra växlar, bangårdar, industrier. Det mesta är byggt ur fantasin, men med inspiration från amerikanska landskap med förebild från åren 1945-1955.

Husen på banan är en aning ruckliga, som detta fyrstjärniga Star Hotel. Såna köper man väl från Faller? Ånej, det skulle inte falla Slamras medlemmar in. Istället klyver man tändstickor på längden och gör “plankor” av dem och bygger upp husen planka för planka, och smutsar ned dem för att de ska se realistiska ut.
– Eftersom vi kör amerikanska tåg så ska landskapet passa. I ett hörn finns ett undantag, en plats som är byggd efter verkliga foton från en plats i Montana. Men vi är demokrater och det kan hända att det dyker upp svenska eller österrikiska tåg och då mobbar vi inte ut dem som kör. Vi är inte petnoga.

Undertecknad tittar upp ur ett hål mitt i en av banans vändslingor, vid mekarbordet tillsammans med Harald. Bild: Audrone Städje.
Modulstandarder
Det finns många modulstandarder för att man ska kunna bygga ihop järnvägen på olika sätt.
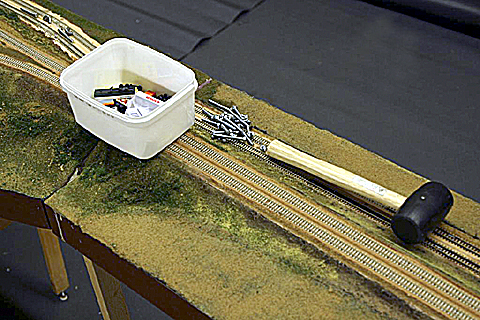
Moduljusteringsverktyg
Ibland är det bara våld som gäller. Här, en instruktiv bild av hur man går tillväga för att efterjustera järnvägsmodulerna efter att de skruvats samman med de illustrerade M6-bultarna.
MMM
Flera MJ-klubbar har samsats om en typ av kompatibla moduler, landskapsbyggklossar, så att var och en kan snickra sitt lilla landskap, sin egen station, en industri, en rangerbangård, hemma på kammaren och när alla träffas kan modulerna kopplas samman och hela banan kan köras som om den vore en helhet.
H0-klubbarna använder företrädesvis MMM (Mälar Modul Möte) http://www.malarmodulmote.com/documents/Malarmodulnorm.pdf, en form av golvstående moduler på ben, med längder i steg om 200 millimeter.
oNe-Trak
Slamra har dock gått sin egen väg på modulsidan. Bland annat eftersom MMM-standarden kräver H0-skala och Slamra kör med skala N. Eftersom Slamra-järnvägen ofta plockas ned och monteras upp på utställningar och mässor, måste den vara demonterbar. Den är uppbyggd med lösa landskapsplattor som ligger på konsoler längs väggarna. Plattorna skruvas ihop med bultar och kablaget ansluts på undersidan.

En modulskarv, en skarv mellan två järnvägssektioner med olika boostrar. Det är ett litet avstånd, men det spelar inte så stor roll. Just på den här bilden råkar det vara märklinräls, men det spelar inte heller så stor roll. Principen är densamma för skala N.
Slamra använder sig av två olika modifierade amerikanska modulsystem som heter N-Trak och oNe-Trak. På så vis kan stora banor byggas och begränsningen för storleken är då lokalen att vara i.
Det elektroniska styrsystemet
Styrsystemets historik
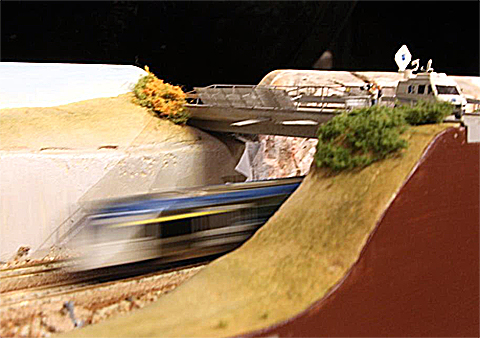
Snabbt snabbtåg av typen Regina på Slamra-banan vid utställningen Modelltåg 09 i Gävle.
Som vanligt finns det en jätteaktör på marknaden, och sen alla andra. Märklin har alltid använt växelström till sina lokomotiv och fortsätter med detta även i den digitala åldern, medan alla andra använder kantvåg.
Det var Märklin som började utvecklingen av den digitala styrningen i slutet av 1980-talet (*se slutnot). De körde den första prototypen omkring år 1986, men man kunde inte köpa produkter förrän år 1990. Detta system byggde på Motorolas komponenter varför det ofta kallas för Märklin-Motorola (eller MM, ej att förväxla med MMM, se nedan). Märklin går som vi vet på växelström där de båda skenorna är ena polen och en rad nabbar i mitten av spåret är den andra. Ett annat förtag som hette Lenz specificerade systemet för tvåräls likström (egentligen växlande kantvåg). Det var på detta system den internationella standarden DCC (Digital Command Control) byggdes. Andra företag, som Digitrax anslöt sig och det blev en amerikansk och tysk standard.
Hur överbryggar man 2-räl- och 3-räl-järnvägar?
Det gör man inte. Det är Märklin (3-räl) mot alla andra (2-räl) och vill man flytta vagnar mellan 2-räl och 3-räl-banor måste man ha strömlösa stickspår dit man kan knuffa in vagnarna från det ena systemet och hämta dem med det andra. Lok går givetvis inte att flytta.
Problemet existerar inte för skala N.
Industriellt styrsystem
Modelljärnvägen har blivit som ett industriellt styrsystem vilket som helst. Det är bara terminologin som skiljer. Precis som i en fabrik har man ett styrdatanät (här: trottelnätet) med klienter (körkontroller) som är arbetsstationer som anger styrvärden för olika delar i processen och visar retursvaren. En seriell buss (DCC-förbindelsen) för ut driftdata via förstärkare (boostern) och de digitala värdena hamnar i digitala PLC-er, styrskåp (dekodrar). Triacar och reläer i PLC:n är de enheter som slutligen manövrerar motorer och pumpar (lokmotorer, lampor, ljudeffekter).
Den största fördelen med de numera individuellt adresserade loken, lamporna, tutorna, vagnarna mm är att alla lok kan köras oberoende av varandra på spåret. Nu kan man köra ett obegränsat antal tåg bara det finns ström nog. Krocka går till exempel väldigt bra.
Standarder

Här kommer ett tungt dieselelektriskt lok, ett blått-vitt-svart från Great Northern Railways ut ur en gipstunnel, bland buskar och träd av vitmossa och dundrar ut på en bro av plast. Men det kan man knappast tro, eller hur?
För att ett styrsystem ska kunna bli vida spritt behövs det standarder, som upprätthålls och utvecklas av standardiseringsorganisationer. Så även här. Den amerikanska standardorganisationen heter NMRA (National Model Railroad Association) och är en icke-vinstdrivande organisation för MJ-rallare. Den europeiska motsvarigheten kallas MOROP (Modelleisenbahner und Eisenbahnfreunde Europas) och är en paraplyorganisation för olika grupper av MJ-rallare och entusiaster.
De båda organisationerna är hör och häpna överens och DCC fungerar likadant över hela världen, även om de inte är överens om andra saker som koppel och rälsprofiler. Det finns en vidlyftig terminologi där olika tillverkare blandar standardtermer med produktnamn och egna namn.

Här har samma lok kommit fram till en växel ute i det karga stäpplandskapet. Den pallsprängda kanten i gips med pålimmat märklingräs ser mycket realistisk ut. Vi utgår ifrån att banvallen uppfyller kriterierna i MOROPs rekommendation NEM 122 “Roadbed Profile for Standard Gauge” och att säkerhetsavstånd enligt NEM 102 och 103 upprätthålls.
Företaget Trix, som numera ägs av Märklin, hade en egen standard kallad SX, men är idag på väg mot DCC.
Körkontroll

En handhållen körkontroll från Digitrax. Den kan användas till något så enkelt som att handköra lok, men också till att programmera lok med nya CV osv.
Däremot finns stora skillnader mellan olika tillverkare när det gäller förbindelsen mellan körkontrollen, det som man håller i handen, och centralenheten (Command Station i riktig DCC-terminologi), det så kallade trottelnätet eller kontrollerbussen. I stort sett har varje tillverkare sin egen variant. Märklin har sin, Lenz har sitt XpressNet, och Digitrax har sin. När en modelljärnvägstillverkare inte har egna produkter utan går till någon annan får de oftast en OEM-låda som de sätter sitt eget namn på. När till exempel Roco säljer sin nybörjarsats ingår detaljer från företaget Lenz varför alla Rocos handkontroller fungerar ihop med Lenz grejor.
Slamra använder trottelnätet LocoNet från Digitrax. Systemet är proprietärt, men specifikationen är offentliggjord för hobbybruk. Det är en bussarkitektur som är väldigt lik Ethernet i logiken, med Collision Detect och Collision Avoidance, men hårdvarumässigt fungerar den ungefär som ett tre-pars tvåtråds multidropnät. Ledningen är partvinnad med en 6-polig kontakt. Datahastigheten är relativt låg. Hög hastighet behövs inte och det blir robustare med lägre hastighet.
När man förflyttar sig från en plats till en annan i anläggningen kan man plugga ur sin körkontroll och plugga i den någon annanstans. Det fungerar bra eftersom det är en busstruktur. Under tiden går loket vidare med bibehållen hastighet, eftersom centralenheten bara repeterar det senaste kommandot.
Den som vill ha det riktigt lyxigt kan skaffa trådlösa körkontroller, som arbetar på det licensfria tvågigahertzbandet. Det finns också kontroller med infraröd överföring.
Centralenhet och booster
Centralenheten producerar en bitström som ska läggas ut på rälsen. Den förstärks i en “booster” och kommer att utgöra både körström och kommandoström. En booster kan mata ut mellan 12 och 18 volt beroende på banans storlek, med strömmar mellan 2, 5 eller till och med 10 ampere.

Här ser du en typisk centralenhet (Command Station) från Digitrax för instegsbruk. Den innehåller en booster, har körkontroll och tangentbord för programmering av dekodrar. Sånt använder inte de stora pojkarna, annat än för programmering. Just nu är det loket med adress 515 som programmeras.

Istället är det dessa anonyma enheter från Roco som gäller, som helt saknar frontpaneler. Du ser två centralenheter på varandra och en nättransformator till höger. Ovanpå ligger en körkontroll.
För att inte riskera brand om det skulle bli kortslutning någonstans har man inte en enda stark booster som försörjer hela banan med massor av ström om man vill köra många lok. Istället har man flera boostrar. I Slamras anläggning är det en booster per rum. Rälsen är avsågad i flera bandelar och varje sådan del klarar 5-8 lok samtidigt. Det är inte alls någon begräsning, och för de allra flesta hemanläggningar räcker det med en eller möjligtvis två boostrar.
Alla boostrar arbetar med samma bitström och går alltså synkront. Därför spelar det ingen roll om ett tåg som kör över en bandel till nästa och kortsluter mellan dem ett kort ögonblick. Det är samma spänning på båda. Det går alltså ingen ström mellan boostrarna. Annat är det om en booster skulle råka ligga i motfas. Det spelar ingen roll för tåget, som fortsätter att gå åt samma håll, men det gnistrar en del just när det blir kortslutning mellan två bandelar. Av den anledningen förser man ofta sin booster med en polvändare, så man enkelt kan lägga hela banan i samma fasläge.

Anläggningen har flera boostrar på olika ställen. Eftersom banan flyttas ibland behövs mobila boostrar, men sådana finns inte att köpa. Istället hart man byggt ihop en kommersiell boosterlåda (svart) med en nättransformator (grå) och en kopplingsbox med polvändare, allt på en praktisk plywoodbit med mjukt bärhandtag.
Hela idén med DCC är att det alltid ska finnas spänning på rälsen. Det ligger alltid kod ute på banan, dvs spänningen på spåret växlar alltid mellan plus och minus 12-16 volt. Signalen består av en rektangelvåg (den kallas så eftersom den ser ut så om man tittar på den med oscilloskop) mellan två spänningsnivåer, till exempel –12V och +12V. Beroende på tågskalan kan spänningen också vara lite högre, upp till 22V. Informationen som skall överföras till loket representeras av spänningens växling mellan dessa två nivåer. En växling mellan dessa två spänningar med signalen 52 mikrosekunder på –12V och 52 mikrosekunder på +12V tyds som en etta. Detta kan skrivas som ( _–). På motsvarande sätt representeras en nolla av en växling med signalerna minst 100 µs på –12V och minst 100 µs på +12V ( __––).
Körkommandona till loken repeteras hela tiden runt, runt. Även om man kopplar ur sin körkontroll fortsätter centralenheten att repetera den senast angivna hastigheten. Även om inga kommandon sänds för närvarande skapar centralenheten NOP-instruktioner bara för att det ska finnas ständig, symmetrisk kantvåg ute på banan. Skulle kommandogivningen upphöra, väntar loket en inställbar timeout innan det stannar.
Varför har man en ständigt pålagd kommandoström? För ett digitalt lok hade en stillastående exempelvis positiv spänning fungerat lika bra som en serie NOP-ar. Men ställer man ett analogt lok på rälsen kommer det att röra sig om inte kantvågen är symmetrisk och skulle tomgångsläget vara stillastående positiv spänning skulle det fara som ett jehu längs spåret.

För storförbrukare är det enklare att bygga in styrelektroniken i ett rackskåp. I detta skåp ser du tre nättransformatorer (A), en centralenhet (B), tre boostrar (C) och diverse intressant kablage (D).
Vem använder analoga och digitala lok tillsammans? Ingen, sannolikt. Det hela var förmodligen ett säljargument i början, nämligen att “Du behöver inte kasta bort dina gamla lok bara för att du börjar med digitalt. Du kan köra ett analogt lok också.”. Idén var att man skulle kunna förskjuta symmetrin mellan de olika tillstånden så att analoga lok känner en medelvärdesskillnad och kan använda denna för sin drivning. Det är därför en etta är 50-60 mikrosekunder gånger två, medan en nolla är minst 100 mikrosekunder gånger två. Nollor kan alltså sträckas ut olika mycket i positiv och negativ halvperiod (zero stretching) och på så sätt skapa en analog obalans och därmed en likströmskomponent. Att det skulle ha använts praktiskt av den breda MJ-majoriteten är mera tveksamt.
Det går istället alldeles utmärkt att bygga om analoga lok till digital styrning, och det ägnar sig många åt. Det är ett betydligt bättre sätt att få full kontroll över sin rullande materiel.
Analoga lok rör sig inte på en neutral DCC-räls, de sjunger bara i cirka 8 kilohertz.
Dekodern

En tysk ackumulatormotorvagn av typen BR 515 (https://de.wikipedia.org/wiki/DB-Baureihe_ETA_150), ungefär som ett pendeltåg. Jämför med femmillimetersrutorna på papperet den står på, och notera den termostatstyrda lödstationen i bakgrunden.
I varje lok och annan vagn som ska kunna styras, likväl som i växlarna, finns en dekoder, en liten krets med tre funktioner. Dels lyssnar den på spåret och kodar av adresser och kommandon. Dels likriktar den kantvågen och pulsbreddsmodulerar den utvunna likströmmen och driver motorn med. Det gamla problemet med modelltåg som plötsligt hoppar iväg när spänningen blivit tillräckligt hög har därigenom eliminerats. Med PWM kan man starta en motor hur mjukt som helst, eftersom man “skakar” igång den.

Dekodern monteras i lok och annat rullande materiel. Det går knappast att göra ett kretskort mindre, som dessutom ska klara av at mata ut effekt, cirka 7×10 millimeter. För den som har större kraftbehov finns det dekodrar som kan driva modellflygplansservon, kanske för containerkranar, vändskivor, klaffbroar mm.
Dekoderns tredje funktion är att tända och släcka ljus och avge ljudeffekter. För detta senare har dekodern en mängd ljudeffekter färdigt inlagda i flashminne. Dessa sänds inte på spåret, utan endast det utlösande kommandot. Givetvis kombinerar man ljudsekvenser och rörelse så att ett dieselelektriskt lok inte bara kör iväg på en gång utan först kommer ljudet av en varvande dieselmotor med tjutande turboladdare och först en stund senare smyger loket igång. Ytterligare en möjlighet är att loket avger stationsutrop och liknande. Med övertygande ekoeffekt.

Här är samma motorvagn öppen och du ser den inmonterade dekodern i vagnens tak. Hör och häpna, färgerna på tilledarna är standardiserade. Röd och svart kommer med ström från spåret. Orange och grå går till motorn. Blå är gemensam plus för alla lampor (lysdioder) och de övriga är andra polen på lamporna.
Just det där med ljudeffekter är lite problem i skala N. Inte så att elektroniken inte skulle få plats, men det är knepigt att få in en högtalare. Det går inte att få basåtergivning, men klockklang och sirenljud går bra.
Man skulle visserligen kunna koppla husbelysning via en dekoder i varje hus in på en booster och kunna fjärrstyra ljus i alla hus, tända brasan i spisen, köra karusellerna på nöjesfältet och så vidare, men det är en dyrbar lösning då booster-ampere är kostsamma. Byggnader och gatljus kopplas normalt till ett eget system med enkel likström.
Systemskiss

Styrningen av järnvägen roterar kring centralenheten (Command Station) som tar emot kommandon från körkontroller och ställverkskontroller i vad form de vara må, och matar ut kommandoflödet som förstärks i en eller flera boostrar innan det läggs ut på rälsen. Körkontrollerna ansluts med en sexpolig kontakt och lyssnar på samma kommandon som rälsen, men i paketform. Trottelnätet är ett paketorienterat nät.
Vill man vara avancerad kan man styra hela layouten från en ställverksdator, eller använda sig av fjärrblockering och göra det hur avancerat som helst. De flesta centralenheter kan ta emot kommandon via USB.
Alla boostrar tar emot samma kommandoström, i samma fas, och har vanligen sitt eget nätaggregat. Man kan i princip koppla in hur många boostrar som helst. Det kan till exempel utnyttjas om man använder sig av transponding och tar emot retursvar från loken. I det fallet behöver man många separata bansektioner att lyssna av, så man vet exakt var det svarande loket befinner sig, på en omfattande rangerbangård exempelvis.
Det rullande materielet, här åskådliggjort med ett lok, tar emot kommandon och drivström från spåret och dekodern likriktar och hackar om strömmen till pulsbreddsmodulerad drivström för motorn. Alla övriga periferienheter som ljus (för strålkastare) och högtalare (för ljudeffekter) sitter på en gemensam plusledning och regleras genom att dekodern sänker olika utgångar till jord.
Växlar drivs på precis samma sätt. Växeln hämtar också sin ström och kommandon från rälsen, men dekodern driver en solenoid (dragmagnet) istället för roterande motor. Till skillnad från i analoga banor behöver man inte såga rälsen runt växeln för att undvika kortslutningar eller att tågen vänder och går baklänges. Det är kommandona som bestämmer riktningen, inte polariteten.
Principen för kommandona på rälsen syns längst ned till höger. En etta är en positiv och en negativ puls på 55-61 mikrosekunder (det kan variera lite) medan en nolla är alla pulsföljder som är längre än cirka 100 mikrosekunder. Och vad är positiv och negativ på banan? Det beror på var man sätter jorden på proben faktiskt, och det spelar ingen som helst roll för loken.
Datapaketens uppbyggnad
I DCC finns det instruktioner av olika längd. Det enklaste är ett kör-paket som består av en lokadress på två byte och en hastighet på en byte. Krångligare blir det med specialfunktioner som att aktivera specialfunktioner som att slå på strålkastarna. Det finns också datapaket för att ställa växlar, till exempel. Vagnsbelysning kan slås av och på.
Adresser
När man köper ett nytt lok har det alltid adress 3, men det kan givetvis programmeras om till att passa i ägarens adressrymd. Adresserna kan vara “primary” som består av en byte och kan adressera lok, växlar mm med adresser mellan 1 och 99 decimalt. Eftersom det ingalunda räcker för entusiasterna finns det en “secondary”-typ av adresser som är 14 bitar. De flesta system använder endast 100-9999 och visar detta decimalt, men systemet klarar rent tekniskt 0 och 10239 (enligt Digitrax system). De utrycks normalt med två eller fyra hexadecimala siffror på körkontrollen. Adress 0 är special för likströms-zero-streching och används inte för lokkörning i DCC.
Configuration Variables, CV
Annat som kan ändras är lokets inbyggda accelerationskurvor, ljus- och ljudeffekter, maxhastighet, mm. Allt detta kan skrivas in i olika konfigurationsvariabler (CV). Vissa av dem är standardiserade och vissa tillverkarspecifika. Variablerna är i själva verket minnesplatser i dekoderns minne och används för att styra lokets uppförande. De är av två typer, rådata eller bitkartor. Rådatavariabler representerar analoga värden som till exempel hastighet. De kan uttryckas som en-bytesvärden eller spridas ut över flera CV om man behöver tal högre än decimalt 255. Bitkartor (bitswitches) används om det räcker med enbitsvärden, till exempel fram/back-gång. Då kan man packa in åtta egenskaper i en CV. Det finns även kombinationsvarianter.
Ett lok kan ha över hundra CV. CV05 anger till exempel högsta hastighet, CV29 är en konfigurationsvariabel på bitnivå som bland annat ställer fram/back och CV33 styr strålkastare framåt, medan CV34 styr strålkastare bakåt. Listan över alla standardiserade variabler finns här: http://dccwiki.com/CV
Adressprogrammering av ett lok görs lämpligen på ett särskilt, avskilt programmeringsspår. Programmeringen görs i sk Service Mode, även kallad Broadcast Programming, där centralenheten skickar ett broadcast- (allmängiltigt) meddelande till alla dekodrar på spåret. Man kan då tvinga en dekoder att byta adress eller förse den med olika CV. Det vore olämpligt att göra detta på banan eftersom alla lok då skulle bli omprogrammerade.
Multipelkörning
Om två lok har samma adress på banan gör de exakt samma sak. Det kan användas vid multipelkörning då flera lok, lämpligen av samma typ, ges en andra adress, ett alias som används för att köra dem tillsammans (consists på engelska). En consist är en grupp av lok som följer en master, för att till exempel dra samma tåg. I USA är det vanligt med väldigt långa tåg, med 3, 5 eller ännu fler lok.
Det går att ordna på flera sätt. Antigen kan centralenheten minnas att dessa fem lok hör ihop, trots att de är olika, och ger dem samma kommando med någon millisekunds fördröjning. Den andra metoden är att ge alla loken samma aliasadress, en temporär sk consisting address.
Dessa lok måste ha samma accelerationskurvor, annars kan de börja bråka med varandra. Naturligtvis finns det datorprogram som kan användas för att programmera om loken så de fungerar likadant i en consist.
BEMF Programming
Man vill gärna ha någon sorts kontroll över tågets hastighet, så att inte ett tungt lastat lok går långsammare än ett ensamt lok för samma hastighetskommando, om inte annat när man kör multipelkörning. Därför gör dekodern då och då uppehåll i drivströmmen och mäter den motelektromotoriska spänningen (Mot-EMK) som uppstår då motorn går som generator under den korta stund mätnigen pågår. På så sätt kan dekodern få en uppfattning om farten och kompensera för tunga laster.
På engelska kallas detta BEMF (back electromotive force) och hur mätningarna ska gå till och hur aktivt resultatet ska användas i styrnigen kan programmeras med CV-variabler i dekodern.

Har du åkt den här rälsbussen? Littera är Y6 men den kallades “Gula faran” i folkmun, iallafall i Södertälje där den på 1960-talet trafikerade sträckan Södertälje Södra (idag Södertälje Hamn) – Södertälje Central (idag Södertälje Centrum). Modell i H0.
Retursvar – Transponding
Den ursprungliga DCC-standarden var enkelriktad. Man lägger ut ett kommando och hoppas att det blir utfört, och att loket rör sig. 1998 dök det upp en dubbelriktad utvidgning som kallas DCC Transponding som är Digitrax patent. Signaleringen går till så att centralenheten gör pauser i dataströmmen och tar bort spännigen från spåren. Under denna tid fungerar motorn i loket som generator som tillsammans med några silkondensatorer generar så mycket ström att dekodern kan svara genom att lägga på ett datapaket på spåret, en sk “ping”. Pingen detekteras av en occupancy detector, en mottagare som vet viken adress boostern lade ut tillsammans med ett styrpaket (control packet) senast, och sålunda vet vem som svarade. Occupnacy detectorn lyssnar bara på en spårsektion (dvs en booster) och kan därför skicka tillbaka numret på spårsektionen och därmed platsen där den rullande materielen befann sig, via LocoNet till centraldatorn.
Transpondern kan svara med värden på olika CV, eller med värden om lokets fart och annan status.
Detta är givetvis mest intressant för sådana som kör sin bana automatiskt. De kan då inte bara se att det finns ett tåg på ett spår utan även vilket. På så sätt behöver datorn som kör inte använda sig av död räkning för att förstå hur långt ett tåg har kommit, utan kan undersöka och få svar på vilket tåg som hunnit vart. Det kan vara av ovärderlig nytta på till exempel komplicerade rangerbangårdar. Status, som till exempel fart, kan också visas på den körkontroll på LocoNet som har givit körkommandot.
DCC Transponding är varken samma sak som RailCom eller som NMRAs lösning för transponding och de tre är bittra konkurrenter. Här brister det verkligen i kompatibilitet och så har det blivit för att Digitrax inte vill dela med sig av systemet. Digitrax tycks dock på något sätt behärska marknaden för transponding.

“Rolling stock in stock” kan man skämtsamt säga. En del av Slamras imponerande samling amerikanska lokomotiv. De svarta är ånglokomotiv från tågbolaget Great Northern som senare blev ersatta av de sammankopplade orange dieselloken vars förebilder byggdes av General Motors (https://en.wikipedia.org/wiki/EMD_F-unit) medan det blåa längst ner är en rengöringsvagn med en liten inbyggd dammsugare utan förebild i den verkliga världen (om man inte räknar SLs och andra tunnelbanebolags försök att bygga fimpsugare). Ett typiskt lok kan dra 200 milliampere under drift, eller något mer beroende på last.
Fjärrklarering, nej tack
Det finns modelljärnvägsklubbar som har infört blocksträckor och automatisk tågdetektering på sina banor, så att hela järnvägen kan köras av en dator, enligt tidtabell. Loken kan också kommunicera tillbaka till styrsystemet så att detta vet vilket tåg som står var.
Även om detta naturligtvis är en lysande teknisk prestation, förtar det emellertid hela nöjet med att köra tåg.
Slamra har ingalunda gått hela vägen och infört alla tekniska finesser som är möjliga, med spårledning, tågdetektering, transponding, datorstyrning, fjärrklarering, trådlösa körkontroller, ljudeffekter som följer tåget runt banan och allt man nu kan hitta på. Här är det manuell körning, ligga och glutta längs spåren, prata med varandra medan man kör och ha trevligt, ja, att slamra, helt enkelt.

Inte Slamra men ändå modelljärnvägsromantik, ett D-lok vid en station i skala H0. Det är nästan så man tycker sig höra kylfläktarna och se gnistorna i maskinrumsfönstren.
Referensdel
Läs mer
Slamra: www.stacken.kth.se/~haba/slamra
Artikel på Slamrawebben, med ännu bättre förklaring av DCC och ett bildgalleri: www.stacken.kth.se/~haba/slamra/dcc/sysoverview.html
Olika svenska MJ-klubbar som bygger med moduler: www.malarmodulmote.se
Järnvägsmuseet i Gävle, väl värt ett besök: https://www.trafikverket.se/jarnvagsmuseum/
Modelljärnvägens hus i Söderby utanför Alunda, dessutom med en stor blomsterträdgård och plantskola: www.modelljarnvagenshus.se
Standarden för mälarmodulerna: http://www.malarmodulmote.com/documents/Malarmodulnorm.pdf
Standarden för den elektriska inkopplingen: http://www.malarmodulmote.com/documents/MMM-DCC.pdf
Stockholms modelljärnvägsklubb: www.smj.org
NMRAs standardsida: https://www.nmra.org/index-nmra-standards-and-recommended-practices
MOROPs standardsida: http://www.morop.org/
DCC-standarden: https://www.nmra.org/beginners-guide-command-control-and-dcc
DCC-wikin med allt om DCC: www.dccwiki.com
Boken “Digital Command Control – the comprehensive guide to DCC”, utgiven av Allt om Hobby, i samarbete med National Model Railroad Association. Författare Stan Ames, Rutger Friberg och Ed Loizeaux. ISBN 91-85496-49-9.
Programbibliotek
MJ-rallare är ingalunda förskonade från programvaruindustrin. Här är en liten sammanställning av en del oundgänglig programvara du behöver för att håla din digitala modelljärnväg igång. Här finns både kommersiell programvara och freeware. http://www.dccwiki.com/DCC_Software
De vanligaste skalorna
Inalles finns modelljärnvägar i ett 30-tal olika skalor, men två av dem är populärare än alla de andra tillsammans.

Vårt eget svenska, mysiga Rc-lok i skala H0. På bilden ser du modell Rc 7, den sista modell som gjordes. Du känner igen den på den blå färgen och den rektangulära telefilterlådan på taket, samt den stora littera Rc 7 på sidan. Det växlades ut speciellt för att kunna dra snabbtåg, under tiden SJ hade problem med X2-tågen.
H0 (“H-noll”, halv-skala-noll) med 16,5 mm spårvidd som med sin skalfaktor 1:87 är hälften så stor som skala 0 (noll) med sina 32 millimeter. Den är absolut världshärskare inom MJ-branschen.
N (“Nine millimeter”) med 9 millimeters spårvid och skalfaktor 1:160. Det finns två avarter av skala N som är aningen större, nämligen brittisk skala N (1:148) beroende på att skalan utvunnits med en brittisk fot som bas, som inte är densamma som en amerikansk fot, samt den japanska versionen på 1:150.

En liten rallare lägger om en växel i skala 1:8 vid Järnvägsmuseet i Gävle.
Det finns många märkliga specialskalor också. I ena änden hittar vi trädgårdsjärnvägarna, som finns i allt från storlekar som man kan sitta på (skala 1:8 med 190 mm spårvidd) och åka med, ned till cirka skala 1 (“one gauge”, skala 1:32 med 45 mm spårvidd).

I andra änden av spektrum finns den nya japanska skala T (1:450) med 3 millimeters spårvidd. Motorerna som används, drivs med 1,5 volt och är ursprungligen vibratormotorer till mobiltelefoner. Spåren är gjorda av stål och hjulen är magnetiska för att man ska få tillräcklig dragkraft.

Det är väl lite si och så med detaljrikedomen i skala T, men järnvägen går nästan att ha i fickan.
Det finns omkring ett hundratal tillverkare av modelljärnvägar, från “Accucraft Trains” till “Ye Olde Huff N Puff”. USA, Tyskland, England och Japan är stora tillverkarländer. Precis som i databranschen har modelljärnvägstillverkarna köpt varandra och gått samman för att få del av varandras teknologi, här snarast digitalstyrningen.
När nu spårvidden är gemensam, vad har tillverkarna hittat på för att i mesta mån försöka låsa kunderna till sitt varumärke? Vagnskopplen givetvis.
Och spåren. Märklin har en pol på de små upphöjda nabbarna mellan rälerna (3-räl), medan båda rälerna är den andra polen och det säger sig självt att det blir kortslutning om man sätter ett Märklinlok på någon annan fabrikants räls.
Värstingarna väljer eventuellt att bygga om sina växelströmslok till likström, eller tvärtom, men någon möjlighet att blanda fritt mellan tillverkarna finns inte.
Slutnot
Undertecknad påstår sig ha fått idén med digitalstyrda modelljärnvägar långt före Märklin. År 1983 jobbade jag på företaget Inter Innovation i Liljeholmen och var med om utvecklingen av de första svenska bankomaterna. Du kanske minns Inter Innovation för dess VD Leif Lundblad som fick industripriset Guldkuggen för uppfinningen Cash Adapter, en sedelutmatare för bankautomater?
Då var mekverkstaden full med modelljärnvägsentusiaster som körde skala N. Vi satt ofta och länge och talade om möjligheterna till digital styrning av modelljärnvägar och hur man skulle kunna föra ut data på spåret, och det nödvändiga med att bli av med lokets beroende av vilken räl som var plus och vilken som var minus. Jag hade inte tänkt på det där med symmetrisk kantvåg för bakåtkompatibilitet med analoga lok utan var mera inne på överföring i form av tonsignaler överlagrade på likspänningen.
Idéerna var ganska klara när jag fick börja jobba med att ta fram en specialbyggd reflexdetektor för att spåra sedlar som for fram femton stycken per sekund i vår nya automat. Det fanns ställen där läsgafflar inte passade utan en reflexdetektor skulle sitta fint. De som redan fanns var inte bra nog och jag hade ett samarbete med den kinesiske VDn för halvledardistributören Litecom i Hartlepool i norra England, med kretsfarbik hemma i Kina. De tillverkade bland annat optokomponenter, men även logikkretsar i största allmänhet och bedrev utvecklingsverksamhet i England.
Det stod ganska snart klart att drivelektroniken till ett lok i skala N var tvunget att vara i stil med en enda kiselkrets, med interna drivtransistorer för pulsbreddsmodulering och eventuellt en extern likriktarbrygga. Ytmontering fanns inte då, men väl tunnfilmskretsar. Jag ritade ihop ett par kretsförslag och diskuterade saken med honom och han medgav att det borde gå att tillverka.

Vad har jag för hållbara bevis för det här? Inte mycket, annat än ovanstående bild från sommaren 1983, som föreställer min kompis Thord framför en maskin på verkstaden i Hartlepool som du kanske känner igen som en bondmaskin, som man har för att bonda, förbinda kislechipar med ledarna i kapseln. Man punktsvetsar fast en 0,05 mm guldtråd först på ledaren i kapseln och sedan på kislet. Därefter värmer man på så guldet smälter av och går vidare och punktar fast tråden på nästa ledare som sticker fram i kapselns inneslutning.
Vår vän sa:
– Jag ska gå på möte i en timme nu, så bonda och lek så mycket ni vill, men kom ihåg att arbetsstycket ska förvärmas till 150 grader.

Resultatet, en del av efternamnet Nilson i mikroformat.